Thanks for chiming in Jon. Good to know I’m not alone in my troubles.
I talked with Jared and Alex from ROCK yesterday afternoon about my issues with SLAM. Super nice fellas that I believe tried to help me any way they could.
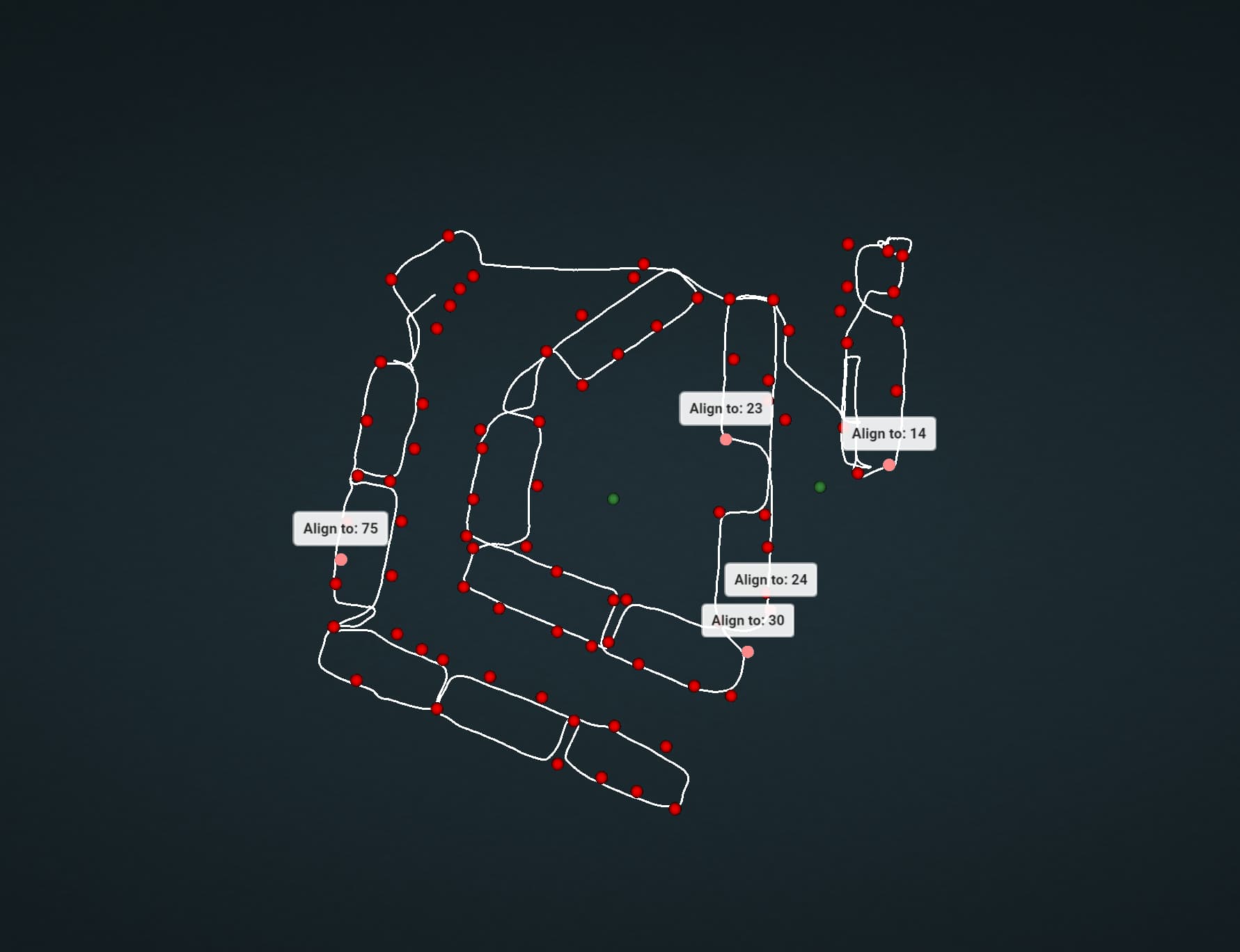
It seems that the main pain points are with how the control is handled when processing SLAM.
We came to the conclusion that my site needed more control points to adjust to, even though it was a very small site. There really wasn’t more of a solution than that I’m afraid.
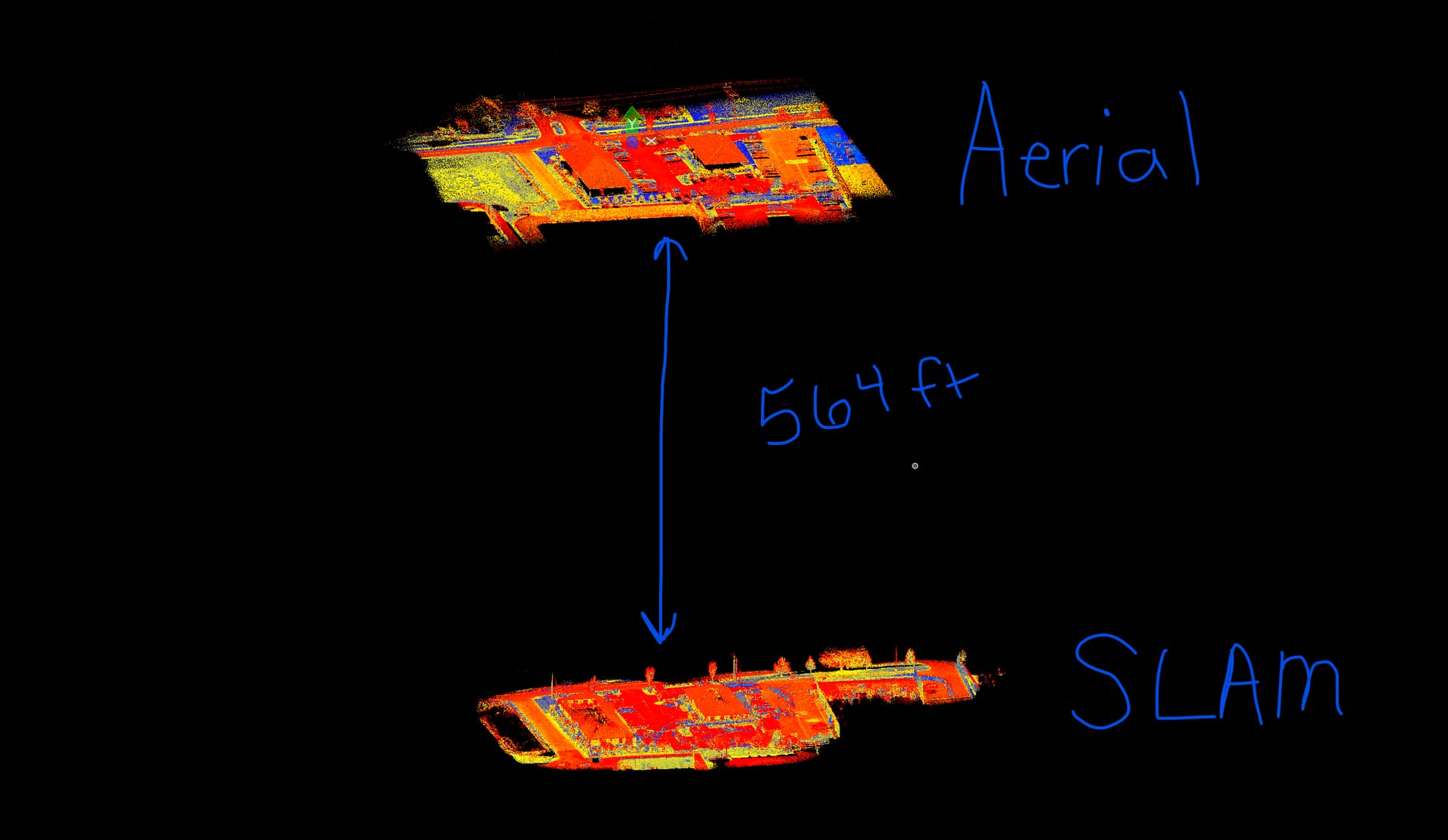
To forego having to manually shoot stripes in the parking lot, I used an aerial lidar dataset of the site to create more control points using ROCK Desktop.
There were some things that had to get sorted before I could do that though. Things such as uploading and reprojecting the aerial dataset BACK into WGS84/UTM. Otherwise, I would not be able to place the control correct spatially when in ROCK Desktop.
Since SLAM data is in WGS84/UTM, the control to tag it with also has to be in that projection.
This was perhaps the biggest point I had to come to terms with when understanding how the SLAM processing works. As a land surveyor, I’m used to State Plane Coordinates and working in International Feet here in South Carolina. Although, I’m fairly tech savvy and flexible, there is no simple conversion process for getting points from one projection to another. Especially not in bulk. None that I’ve seen or tried so far.
I brought these new control points I made from my aerial dataset into the SLAM project and processed it. The point cloud now seems to align well and all that is left should be reprojecting it into State Plane Coordinates.
But I feel like this was a TON of back and forth just to get a working SLAM point cloud, which as of right now, before I’ve reprojected and exported, I still don’t know for sure if it will align with my aerial dataset.
All that said, I couldn’t imagine your situation. You can’t just fly an aerial dataset to place more control points. You’d have to go and manually place more targets AND rescan likely. I had to add 30 more targets to my site with only two small office buildings, so there’s no telling what you might have to do.
With all respect to the folks who have created this tech and made it available to folks like us, they have made something incredible but it doesn’t feel as refined and usable as they sell in the videos and marketing. I would’ve never known the solution if I hadn’t spent 3 weeks of back and forth with ROCK Support, eventually asking the right question. I simply didn’t know, what I didn’t know.
It made sense when you said that you’ve watched the videos and had no luck, because there are things that are not mentioned in videos that are pretty big pieces of the puzzle, namely the control situation.
The aerial aspect is fantastic, no complaints there. But the SLAM seemed too good to be true, and I hate to admit that I’ve felt that be true since we’ve bought it.