Thanks for the update Ben. With the GeoSLAM Zeb that I demoed the protocol is to essentially occupy (set the slam unit directly on top of) control points for about 15 seconds. Maybe this or something like it could be a useful strategy for the RR slam algorithms.
@Alex I know the v2 SLAM mount should be available soon, if it isn’t already.
One question on that. Does using the GPS enable the point cloud to be processed in US or international feet? or will everything still be in meters and then you reproject into the correct units like the aerial lidar?
Hi @Ben_SDI The GPS enabled SLAM is in the works but we don’t have a definitive release date yet. It will record data in the WGS84 format.
Thanks Jared! That’s helpful info.
Here’s an update about some successes we have had with ROCK SLAM. Yes, I mean successes.
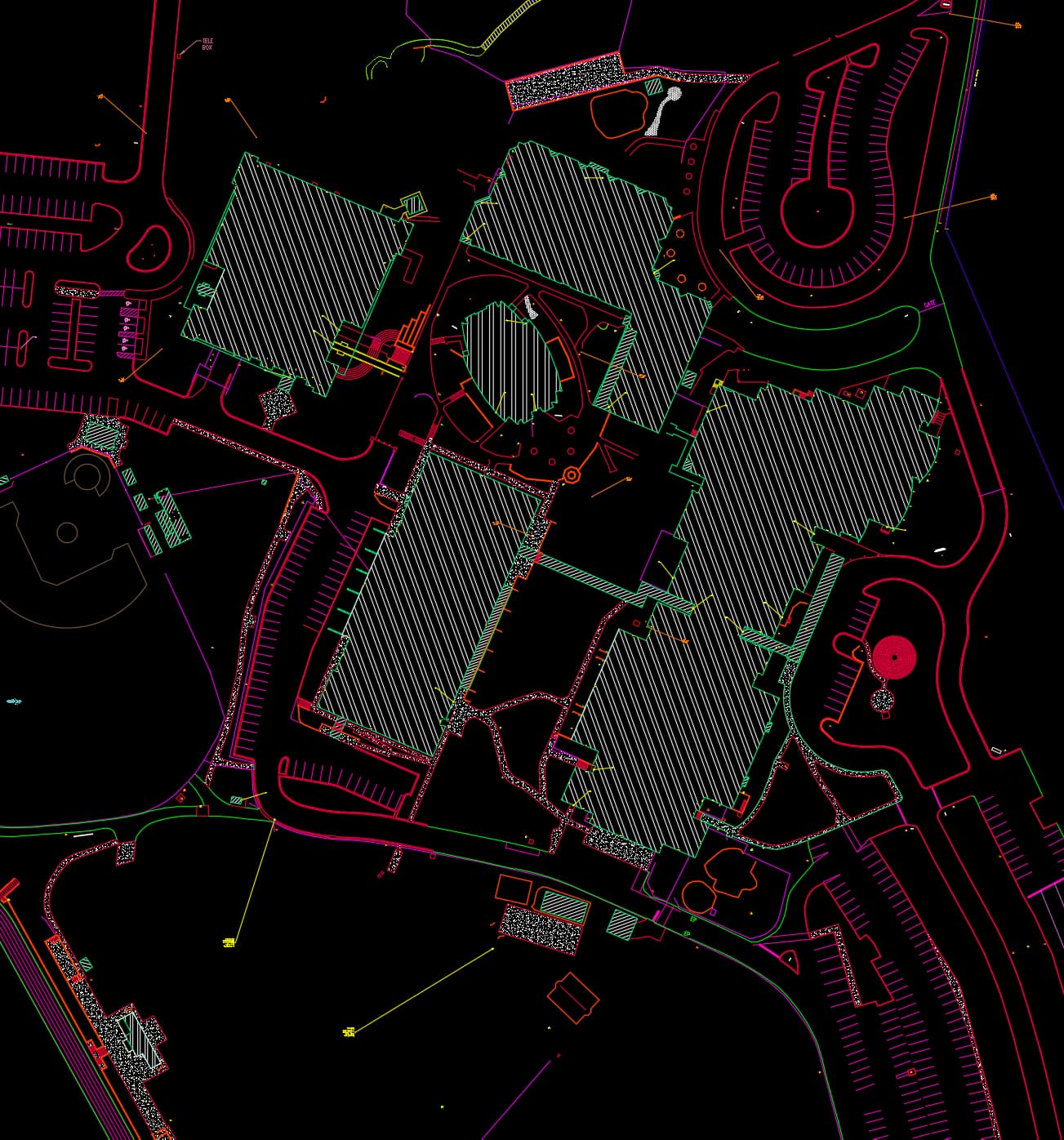
I mentioned how we had been attempting to collect buildings on a large school campus. I’m glad to report that using ROCK SLAM, we were able to collect accurate datasets of almost all buildings on this massive site. We drew these buildings in Microstation/TopoDOT.
This likely saved us weeks in on-the-ground field work and likely thousands of dollars in labor.
This was the product of a lot of experimenting. We did end up relying on using GCP points and building corners to translate, rotate, and scale building linework to the correct position. Certain dimensions were quality checked against field shots with low relative error. We’ve seen accuracy of several thousandths when field measurements were compared to point cloud measurements.
This job is almost ready for delivery to our client now and we are feeling fairly confident with the product.
It could NOT have been possible, with the timeline we were given, WITHOUT ROCK aerial lidar and SLAM. We also prepared a topographic surface for this site and that was as satisfactory as ever using the R3Pro and M350 RTK. If anyone has any questions about this work, let me know and I’ll try to answer as best I can.
LOOKING FORWARD…
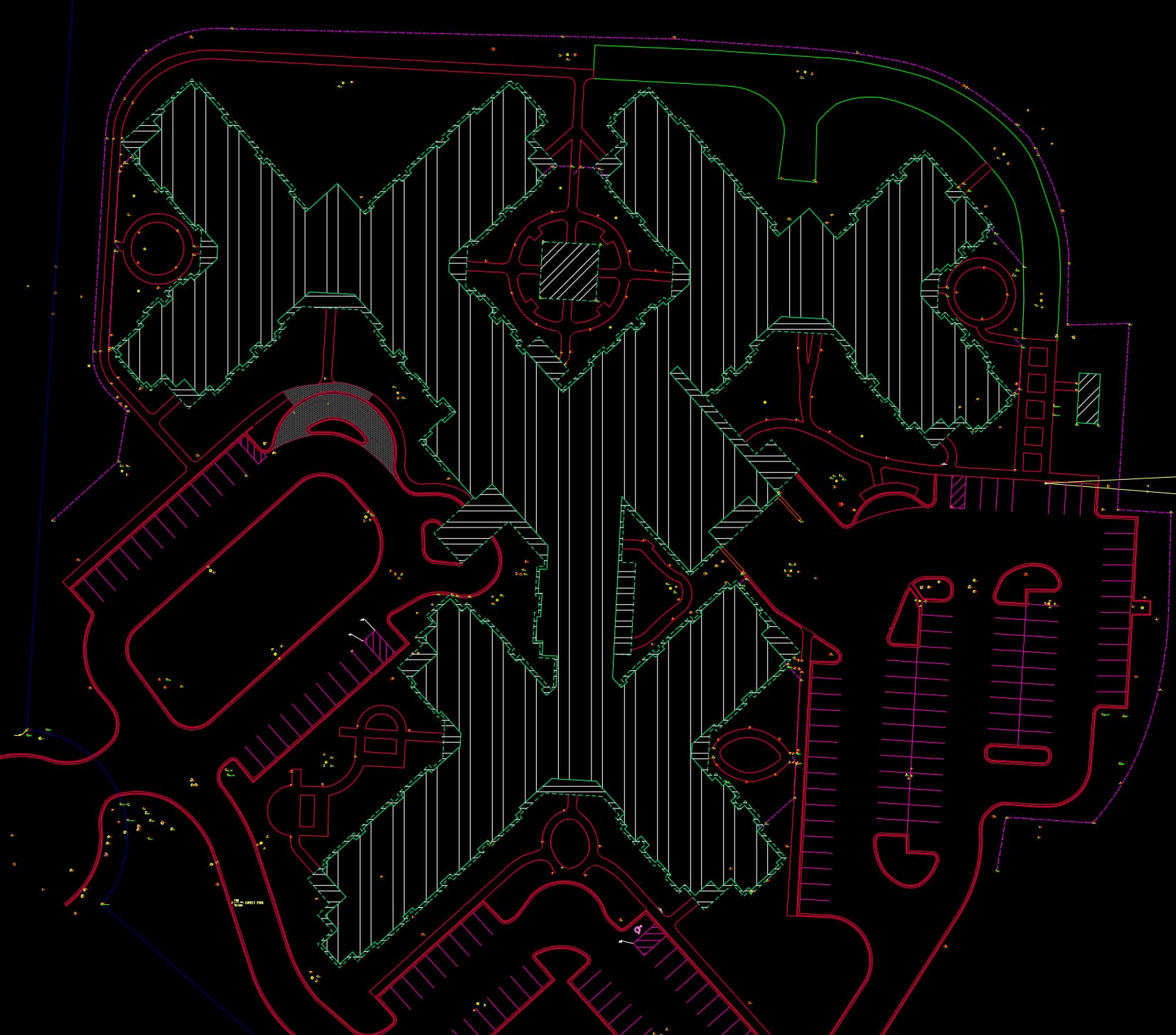
For the past week and a half, we have been using ROCK SLAM to collect building data on a long list of retirement homes that needed as-built surveys. I think we have completed 5 or 6 at this point.
This is a huge and rapid implementation of SLAM technology for us and we have been able to draw, with a fair degree of accuracy, the buildings on these sites. Most of these buildings include closed off courtyards as well and using GCPs in the courtyards, we have been able to scale them into place and draw them from LiDAR data instead of sending a crew in. This is easily saving hours of field work. Its saving hours/days of field crews traversing around large buildings. We are still in the heat of battle with these (I’m processing a SLAM session in ROCK Desktop as I type this up).
Every building you see below was captured using ROCK SLAM.

SOME IMPORTANT NOTES…
These buildings were all translated, rotated, and scaled into place. The point clouds output in meters and are arbitrarily placed in space, not on grid nor with correct units. All dimensions are all relatively correct to each other but the data is shrunken.
With the V2 SLAM Mount, the point cloud data will be collected in WGS84 which will make it even easier to reproject and scale correctly and align in ROCK Cloud. This is very desirable for us because we would LOVE to not have to scale and rotate and translate. And while the point cloud can be “aligned” to control and the “accuracy increased” by tagging GCPs, I’ve been putting in 9 hour days for over a month and a half trying to use those methods, and I can say confidently, that it isn’t ready.
If someone wants to me go in depth about why I feel that way, I will make another reply about that specifically (ALOT to cover).
With all that said, if anyone wants to talk about anything, reply to this and lets talk. I’m not an authority on this, but I’m implementing this tech and I know others are struggling to do so with me. So lets talk.
ALSO, I want to make one thing VERY CLEAR.
I am a HUGE ROCK Robotic fan. What this company has been able to do to enable the average surveyor or DSP to collect accurate LiDAR data is nothing short of astounding. The prices…astounding. The quality of point clouds…astounding. The applicability…astounding.
ROCK Robotic is LEAGUES ahead of other companies in the field when it comes to usability. Having worked with another LiDAR provider in the past, I can assure that the processing and capabilities are almost as easy as the could be when using ROCK.
With that praise given, I know it may seem like I am crapping all over ROCK and their SLAM tech. Nothing is further from my intentions. I stand behind ROCK and would recommend to anyone. I have no ill will toward the company or any members thereof.
What I do have is a belief that honest and forthright constructive criticism will help this technology be more applicable to more users. Like sanding wood or water over a rock, given enough time and attention, the process can be made into its best form. I’m not a developer and I can’t begin to understand how to make this stuff do exactly what you tell it, every time. There is no button that can be pushed to take out the kinks in workflows or create new ones automatically. I respect that more than anything. But as a customer and someone who views ROCK Robotic as the Apple of LiDAR companies, I want the best for the company as a whole.
If my critiques ever made anyone on the ROCK team feel inadequate or upset anyone, I am sorry for the offense. I’m most definitely on your side. I’d rather work with the team and the community to help everyone apply this tech than be seen as someone who just complains, at least I hope that’s how I’ve come across.
2 Likes
@Ben_SDI Thank you very much for the feedback. I think it would be great to have a meeting with one of our software devs to see how you are using the GCP align feature in Rock Desktop so we can better solve this problem with you.
Hey Alex, that would be awesome. I’ve also been having some interesting alignment “anomalies” on a few jobs we’ve done lately. I think it would be an interesting case for the team to look at.
I’ll send in an email to support soon to set up a time to talk!
1 Like
I am going to be attempting some more SLAM testing this week and next if I can get clearance on a site across from our office (large apartment complex). I will be in touch with support so hopefully I can take you up on the offer to talk to a dev.
Going to be flying and SLAMing. I won’t be setting targets physically, but I will be creating them from the aerial lidar data. I will use those points to adjust the SLAM data to. So should be a good exercise/example in tagging.
I just wanted to follow up that the carry battery was found to be faulty and the R3 Pro SLAM mount was fine.
Once I received the SLAM kit back from Denver I have run 5 slams and they all came out great.
Again I used several SkyHigh Lidar targets that were GPS RTK located from previous control and elevations were fine (never had problem horiz).
In Rock Desktop, I ran trajectories and added gcp coords to tie the cloud to the real world and ran final optimization, no problems.
I look forward to the availability of V2 SLAM mount when available along with the mobile mount.
Howdy @leo_stan , I appreciate you providing the background of what the software does. Alongside this though, I’m curious on adding back in pieces of trajectory removed by the breaking algorithm. Is that not recommended? My initial trials with the alignment process was to add the whole trajectory to the point cloud export, but that seems to negate the alignment entirely. How might I go about adding and removing pieces of trajectory post Step 3?
Thanks,
Lucas
Ben - thank you for all these posts - I appreciate the thorough work you’re putting in. Catching up on your journey, am I summing it up correctly by stating that you’ve had great success using SLAM with no GCP alignment with rock desktop? You use topodot to translate or rotate the clouds? Once you add the GCPs in, that’s where the data starts to fall apart?
Hey @Jonrowsell
Glad you’ve found the posts helpful.
I actually need to update this post because of some slight progress I’ve made within the last few days.
What we WERE doing was taking an unscaled, unprojected, untagged by GCPs SLAM point cloud and we would use TopoDOT to draw out the dimensions of buildings. We also had a few control points that were painted and field shot that we would also be able to see from the SLAM capture. By being able to see these control points, we would mark them in TopoDOT as well.
Then we would export that linework from Microstation/TopoDOT into Civil 3D, which is were we do our normal surveying linework (i.e. anything that isn’t extracted from LiDAR).
We would then load in the control points in Civil 3D that we had shot in the field. We would copy and paste in the linework we drew in TopoDOT. Then we scaled and rotated based off of the marked control points that we had extracted earlier.
To be clear, this is NOT the ideal format. Not ideal in the way that I would rather draw with 1:1 point cloud data than draw to a scaled version and then rotate and translate. That just doesn’t feel like surveying.
So the ultimate goal is to have a 1:1 representation/point cloud to work with that is placed correctly in space and rotated and scaled correctly, and then draft off of that.
SO would I say “great success”? No I would not, I would saw we succeeded at making a passable outcome. I do not recommend this to surveyors or anyone trying to do high accuracy work.
THIS WEEK I have been working closely with ROCK support to come up with some refined processes for reaching that goal. I have been able to make some progress but there’s still some work to do.
Where I am at now is requiring the site to be flown for aerial lidar collection first. Then we SLAM what we want. We then use the aerial lidar data to create control points to justify the SLAM dataset to.
We then take that control and only go as far as the “Align to World” step in ROCK Desktop.
To answer your last question, if I go any further than this, the data falls apart. The “Align to Control” step in ROCK Desktop breaks the data up periodically and does NOT reliably align the data to the control. The only time that this MIGHT work is if you have MASSIVE amounts of control around what you’re SLAMing. It has to be like 30-40 shots on some average sized buildings to not have data misalignment. I’ve expressed that this is not a good solution because it is far too time consuming and the results are hit or miss from my experience.
Continuing on where I’ve come to lately, after the “Align to World” step, I do the final processing on the SLAM dataset. Once completed, I then export to ROCK Cloud where I reproject the data into the desired coordinate system.
Side note: if any folks from ROCK read this, it would be fantastic if the reprojection and aligning to GCPs was included in ROCK Desktop. It makes sense for it to be there so one can do front to back processing of their data locally. Besides being just a way to keep people paying for ROCK Cloud, I’m curious to hear why this hasn’t been done.
Lastly, I export the reprojected point cloud from ROCK Cloud and I import it into Microstation/TopoDOT to compare it against the aerial lidar dataset.
The results I’ve gotten so far have the two datasets mostly aligned horizontally. Vertically it leaves some to be desired, but mostly by a few tenths.
This is good enough to extract buildings for planimetric purposes. So if we are thinking 2D, it’s fairly usable.
MY PROBLEMS WITH THIS are mostly centered around the time it takes to get a result and the fact that the site HAS to be flown to get control that is easy to work with.
If you didn’t fly the site, you’d have to shoot in the alignment points in the field. That’s not so bad, but then you have to convert the points into WGS84/Ellipsoidal.
I’ve tried and looked but there isn’t a great all in solution for this. Converting points in ROCK Cloud is good for the horizontal conversion but I think you still have problems vertically.
So you have to create the control from the aerial dataset BEFORE it has been reprojected. If you can’t fly the site, you’re out of luck in my opinion. The whole GCP thing just doesn’t seem super fleshed out. While I was having all kinds of trouble with it, I asked for a dataset from ROCK where they had any success with a GCP-aligned SLAM dataset and I got told they don’t have one on hand that they can show off. That’s not very confidence inspiring. My contact did say he was reaching out and trying to get ahold of something he could show me, but I still haven’t gotten anything. Not his fault if they just don’t have a good demo dataset for that, but I’d like for someone to at least admit that.
ANYWAYS, I think I’ve come a good ways so far. I was reaching a moment there for a little bit where I was ready to throw my hands up and say that it simply isn’t ready yet. I still kinda feel that way, but I received a bit of a lifeline this week that may keep me trying for a little while. We still haven’t been able to apply this to a consistent workflow though and to be honest, by boss is kinda pissed that it was sold as much better and usable than it actually is. But we press on. Hope that answered your questions, as well as give an update on where I stand with SLAM these days.
1 Like
Hi Ben I am only using Rock Desktop to run the trajectories with the UTM zone in meters coords of the GPS RTK gcps, then bring in the processed .laz file to Autodesk ReCap where I can convert from UTM meters to Maine East 83 in feet and adjust the cloud origin point to match the GPS RTK coords on the gcps. It will locate correctly when inserted to Civil3D 2024 (for instance). This workflow took about 60 min for the largest SLAM so far of 6 acres. Again I cant emphasize enough the utility of the LiDAR targets from Sky Horse as a solid link between the standard GPS RTK point and the point cloud.
I use 4 or less gcps in this method.
Yes I have verified these jobs with aerial and it matches less than a tenth across the job.
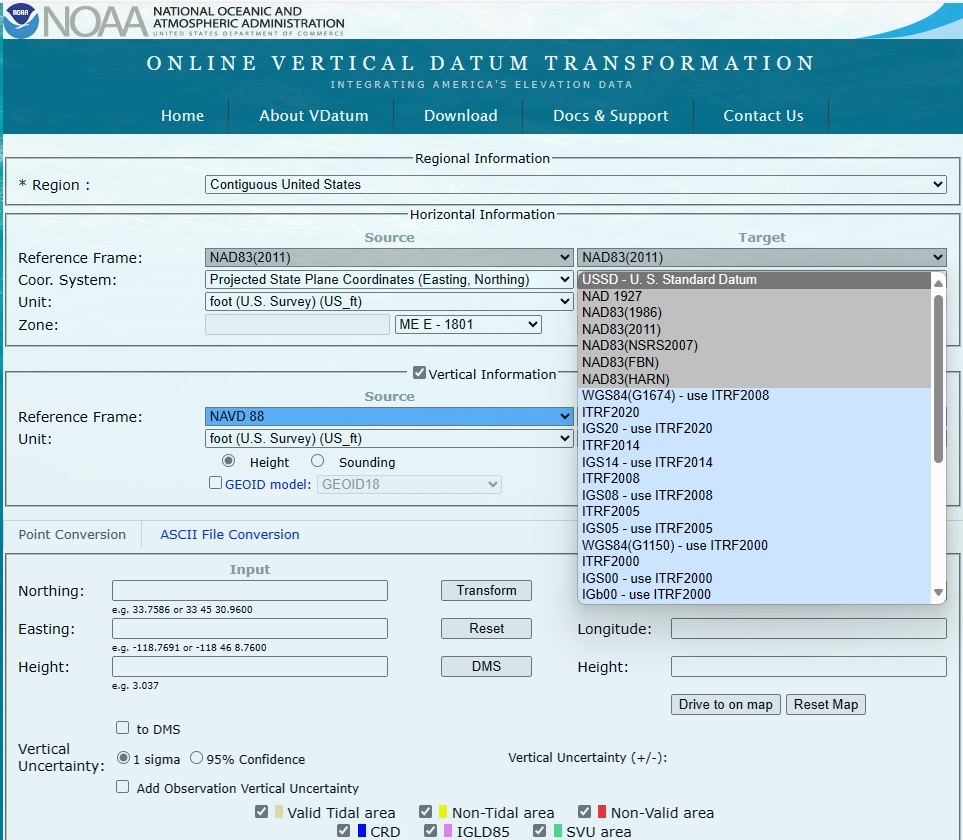
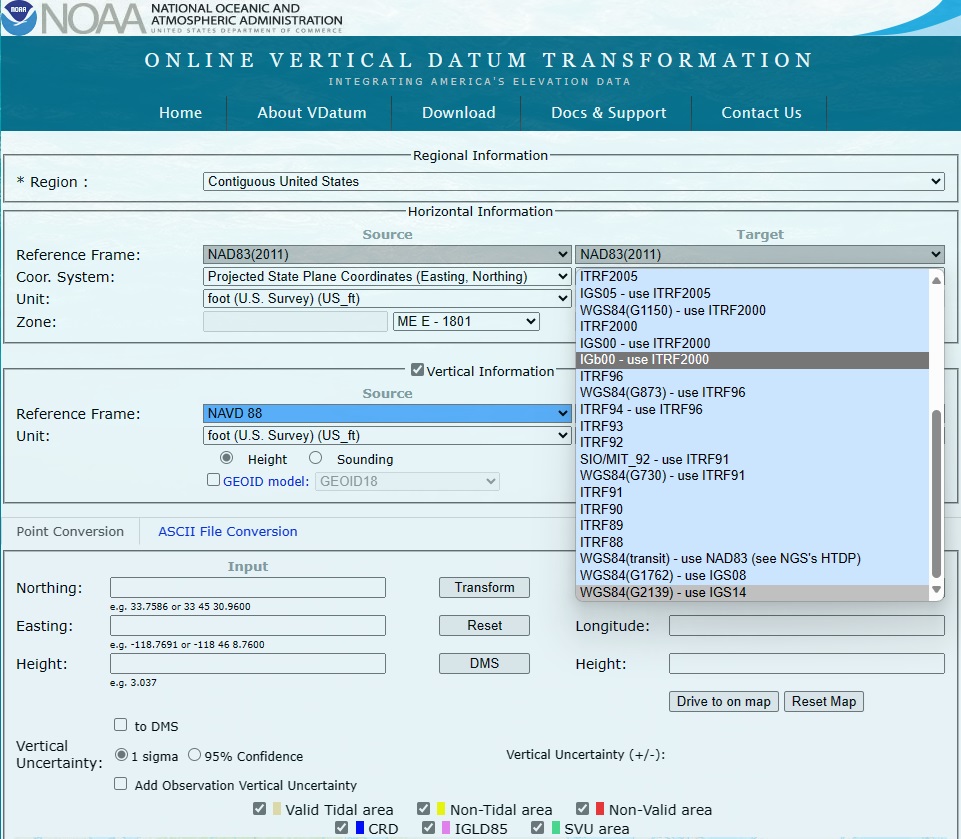
I too have not had any success in aligning aerial in Desktop with the WGS84 and the Ellipsoidal height in VDatum it maybe that I am selecting the incorrect version of WGS 84 (see images from VDatum selection menu.
Something must have changed in a recent Desktop version as I have found no vertical problems that I had in November.
UPDATE June 2024
Pre-Script: The V2 mount with GPS has been made available but we haven’t acquired that. Mainly cost dictated, but also we lacked some confidence. Also I should mention that several weeks after the V2 mount released, I requested a demo dataset where SLAM was collected with GPS and ROCK didn’t even have a demo dataset to use. Thought that was weird. Anyways…
I’ve decided I will briefly update my thoughts of ROCK SLAM. Not much to cover honestly.
My team and I came to the conclusion that we don’t feel confident in producing anything survey grade with the R3Pro with SLAM. Not without substantial work arounds which we don’t feel comfortable with.
The control tagging process just isn’t there in my opinion. You need exorbitant amounts of control points to align a site. Even then, there’s a chance it won’t align separate passes together or align to the control within a tolerance.
Earlier in this post, I showed us doing large building scans. But we didn’t use any control around the buildings because it would’ve been too time and labor intensive, no doubt rendering the jobs unprofitable.
What we did do was draft linework off of the scans which are not to real world scale or positioning. Then we scaled, translated and rotated that linework in accordance with building corner shots we had taken (The same could be done with ground control around the buildings, but substantially less than would be needed if tagging inside of ROCK Desktop).
So ultimately we had to manipulate the data into position instead of it being collected accurate to the real world. The tolerances were good when we compared the linework to the field shots, but it still didn’t feel the best to collect and submit the data like that. It gets the job done but only as a work around. Any surveyor worth his salt would rather the data be collected accurate to world. IMO that’s a main part of land surveying.
With that being the case, we decided not to continue with that method.
So we went back to the drawing board and tried to lean into tagging SLAM data in ROCK Desktop to try be able to draw to world-accurate data. Spoiler: This never worked for us.
All the issues I’ve stated before persisted. The main takeaway is that you need too much control for a site to be usably scanned and even when you have all the control you would possibly want, it may not come back aligned correctly.
So our final conclusion is that the R3Pro is a great aerial data collection device, but making it do survey grade SLAM is asking it to do something it may not be ready for.
To be fair, the unit may well be ready but I think the software to process is the biggest hurdle. I just don’t think it’s there. I know there are some others that are using it but I’m not sure how they are getting the survey grade they might need.
With all that said, we abandoned ROCK SLAM and likely won’t be subscribing again when it comes time to renew. We will continue to use the R3Pro for aerial data collection but that’s pretty much all we are getting out of it. I wish luck to folks who continue to use this and I hope they figure it out!
2 Likes
Here’s a little anonymous poll for my curiosity. Make sure to read my latest update message also.
- ROCK SLAM works well for me.
- ROCK SLAM has KINDA worked well for me.
- ROCK SLAM has not worked well for me.
- I have NOT tried ROCK SLAM yet.
0
voters
2 Likes
Thanks for all the feedback on this Ben, it’s super helpful. Were you using the GNSS enabled SLAM or the pure SLAM? I’ve been trying to get them to let me demo the R3Pro for SLAM for months and they essentially just stopped responding to me (even though I am a current customer and live very close by). My main reason to upgrade would be the SLAM capabilities. It made me wonder if the equipment wasn’t working up to snuff, even though it’s being sold very differently.
I’ve decided to move on. I contacted CHC NAV about their RS10 RTK SLAM hybrid, and their sales rep drove out from Utah to give me a demo. Quite a different experience. In a couple tests it seems like cool tech. When you get GNSS fix it is essentially adding control points, they you can lose fix and come back to fix. Seems to work pretty well. It’s also the spinning type so you don’t need to wave it around. I’ll check back with results.
1 Like
Happy to help Scott.
I did NOT use the SLAM with GPS (V2).
The price alone was enough for us to not pursue. Also, like I mentioned in my last post, ROCK didn’t even have a demo dataset to share with me that was utilizing the GPS. I didn’t think that was a very good sign.
I’m sorry to hear it didn’t work out for you. We are in the same boat it would seem.
I hope that the new methods you’re trying get you what you’d hope to see.
As far as how the SLAM product has been sold, we have also felt like we got sold a gimmick. It’s not survey grade in our opinion (to be fair, it’s not marketed as survey grade, but it’s almost implied), but it could be useful for 3D representations mostly. The amount of work it takes to make it survey grade is unrealistic.
ROCK also has a problem with the support system they have set up in my opinion. Some folks don’t seem as though they are familiar enough with the SLAM processes to help customers obtain a finished product. Combine that with the software not being robust/polished enough to get the right product.
That brings me to one of my least favorite parts about ROCK.
They pass the buck.
I couldn’t tell you how many times I’ve contacted support just to be told I’m not doing something right. I would not consider myself akin to a troglodyte by any stretch, I am decently tech savvy. And I’ve done LiDAR for several years before adopting ROCKRobotic as our system.
But too often has it been MY fault according to them. When in reality, there are issues with their software OR I do exactly what they’ve told me, just to have them tell me I need to do it another way.
It’s like a mind game or something. But they rarely take responsibility IMO. There’s been a change in the structure at ROCK in the past year or so, so I’m told. And that change is evident in putting out things that aren’t ready, using customers as guinea pigs, blaming them when it doesn’t work, and as you mentioned, just avoiding the questions altogether.
2 Likes
Ben, I have had a similar experience. I bought the SLAM V2 dock with GPS, it has been a struggle, but I think I may have actually produced a survey tolerance data set using the GPS enabled SLAM. I have yet to be able to colorize a SLAM set after much time and effort. The screenshots here show that I have multiple passes over the same areas and they seem to align quite nicely. I previously processed this same data without GPS, and it sucked. Will update if I have more success.
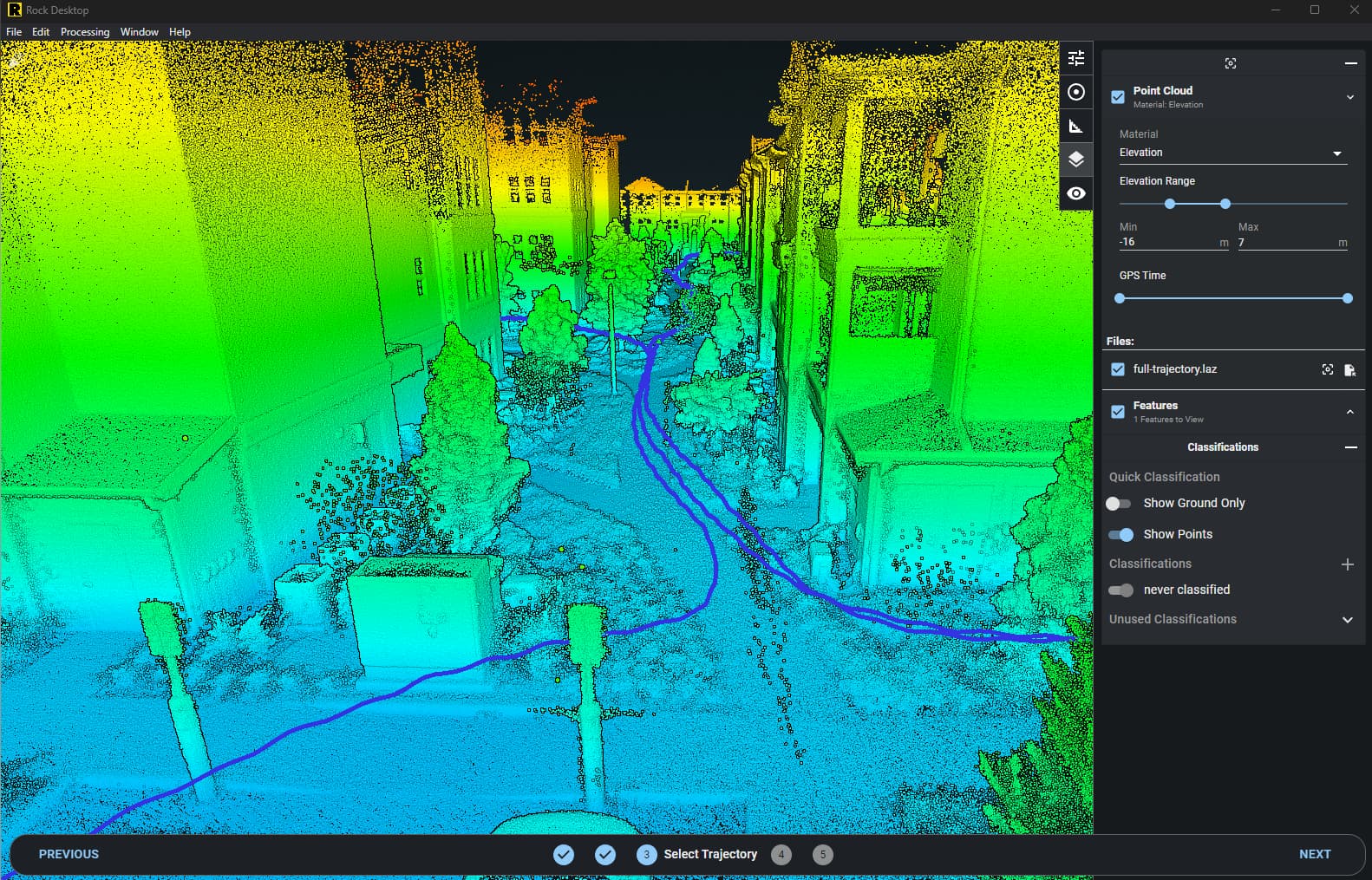
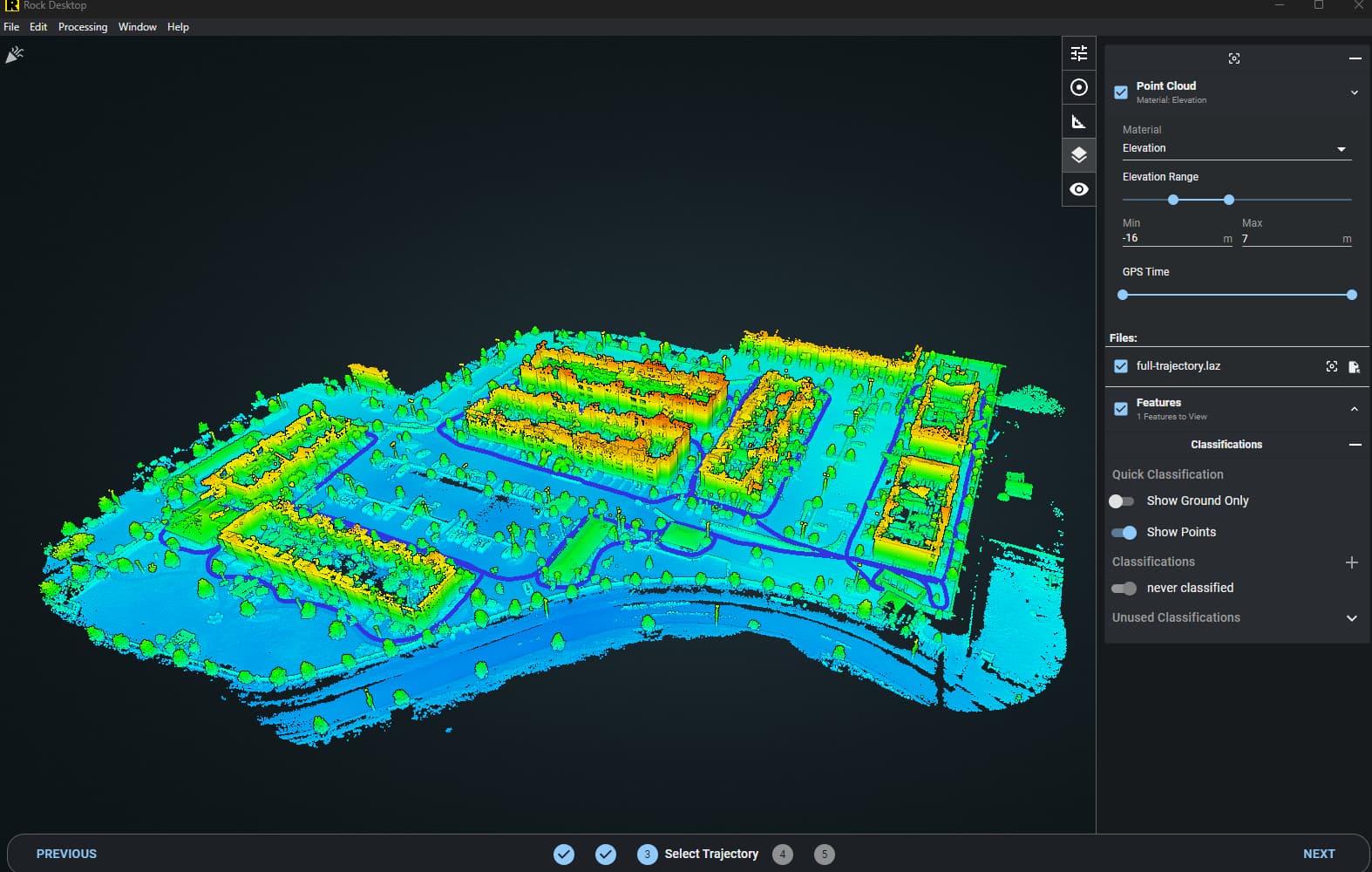
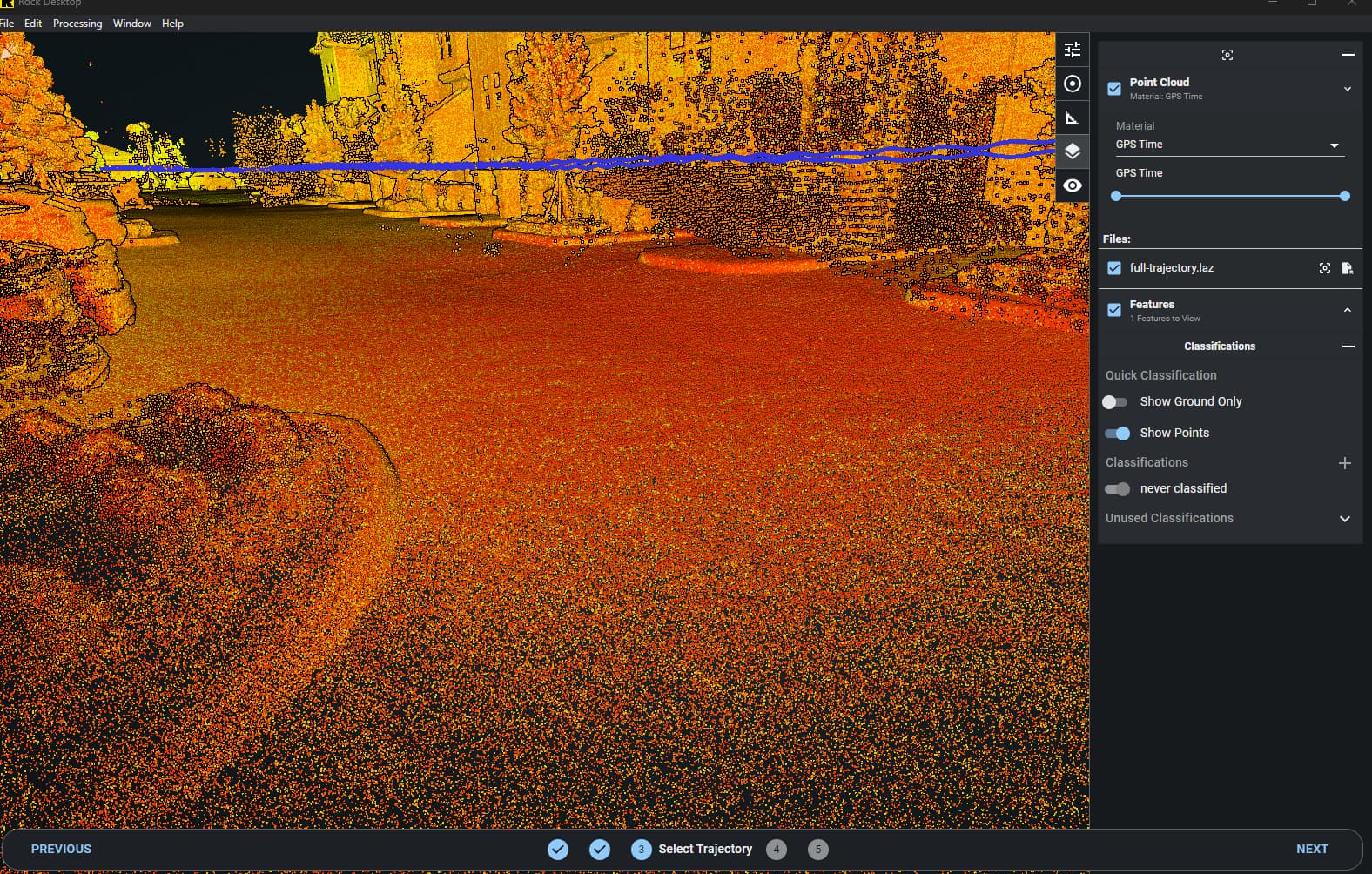
Looks pretty good from this angle. Is it aligning to any control?