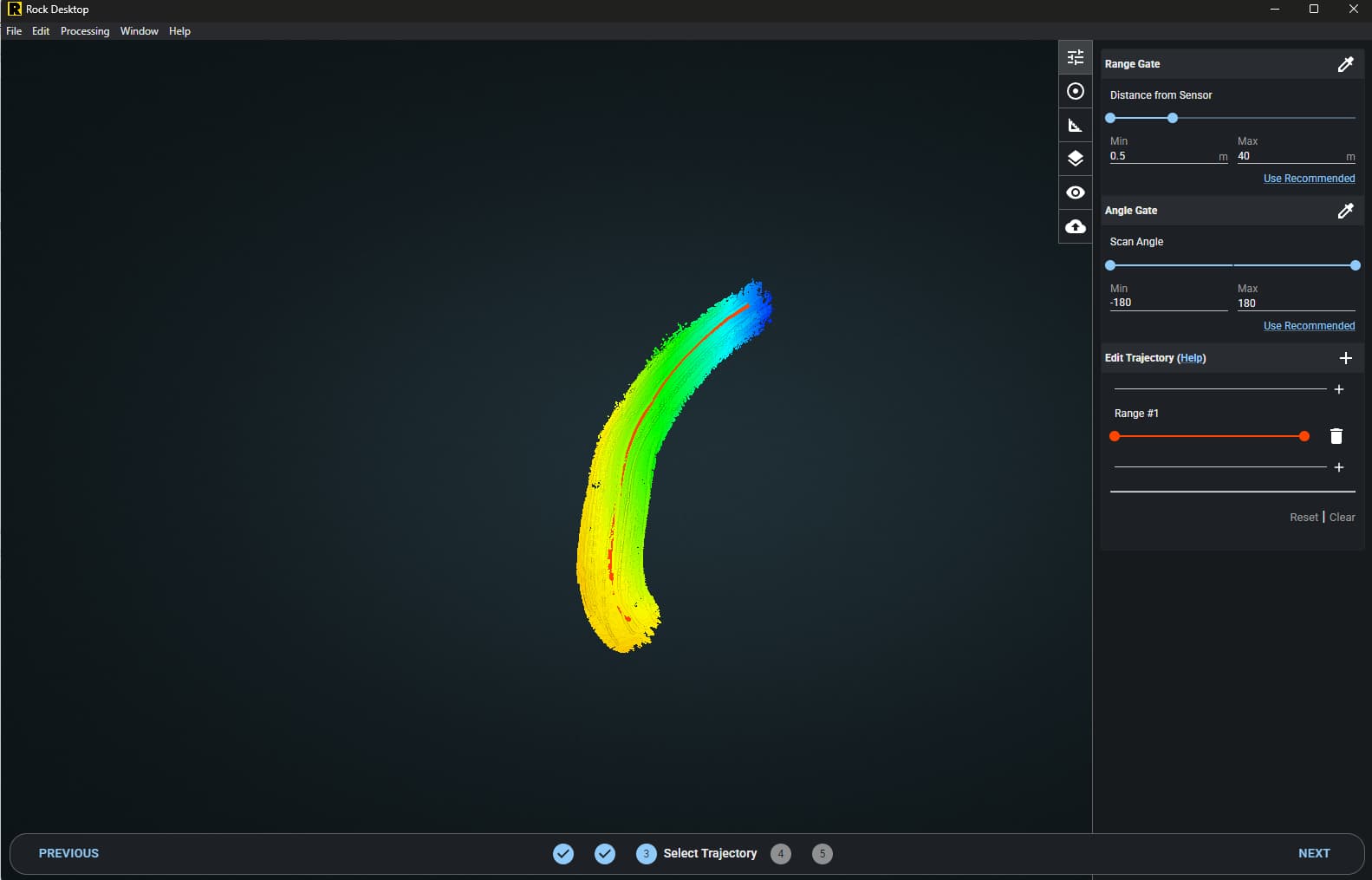
Hey everyone. My company has recently upgraded our LiDAR unit to the R3, and we’ve also got the SLAM dock. I have been running a few test data captures with the SLAM feature, and I would say 8/10 times I get a drift error, and the data comes out all weird. (see attached picture) I have done multiple successful indoor SLAM tests but only 1 successful outdoor test. I have read all of ROCK’S suggestions on how to mitigate drift and I haven’t had any luck. Has anyone else ran into this issue?
I’m also trying to figure out a method to get consistent SLAM data.
However, outdoor data seems to work well.
It looks like the test in your screenshot may be too short. eg not enough data.
Some questions to narrow it down:
Do you have the insta 360 and GNSS antenna fitted?
Do you get flashing green led before starting data capture?
Are you waiting for 30 seconds to collect static data with green flashing led before starting to walk?
Are you walking slowly?
After completing static data capture, walk in a straight line for approximately 40 feet, then complete a high dynamic (ex Figure 8) capture.
Some info here (you hae probably already seen it):
Also, the recording from Rock SLAMBOREE:

Thanks
Jason
PS. SLAM processing in latest version of rock desktop is broken, use v1.13.37 until a fix is release.
Thanks, Jason, for the feedback. I will take these things into account next time. Does the figure eights work for the SLAM? Also, have you ever seen a flashing red to blank and back to green light when you start the SLAM after it “warms” up for the first 60 seconds. I noticed this and my data usually corrupts when it does this.
The figure eights / high dynamic are advised for slam to initialise the IMU. It’s mentioned in that link.
I’ve not seen a flashing red. I’m doing some more slam tomorrow, will keep an eye on it.
Today I was watching the led when performing SLAM (with GPS antenna attached)
Led status was:
Power on > solid red > [wait for initialisation] > solid green
Activate data collection > green / red alternate > flashing green
I did not see a flashing red status
Thie video on this page shows it quote well:
Dylan, this is Andrew with ROCK. Can you please send me an email (support@rockrobotic.com), and we can set up a date and time to go over your questions and discuss the best approach to data collection? From your additional post and image, I would like to know the different settings you selected on Step 2, as well as your outdoor collection environment to better determine what could be causing the drift. Thanks for your help, and I look forward to your email.