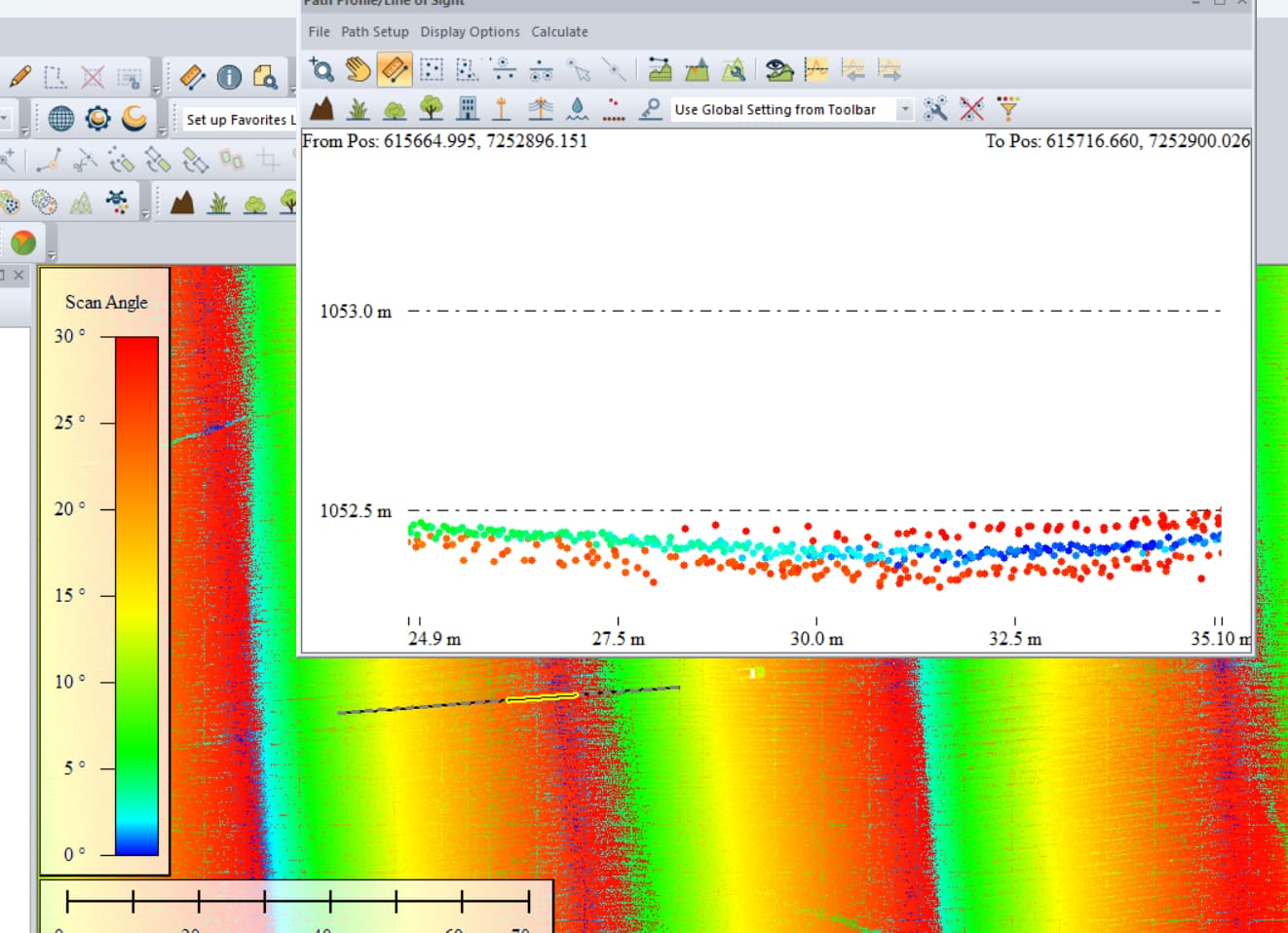
Hi Guys, I notice a fuzzy data in some areas of my point cloud and after checking it several times I discover that the bad data come from high angle scan, in real, not too high, over 30 degrees you’ll start to see some fuzzy data, looks like there is a misaligment or a innacurate data when scan angle changes. Considering this is a 360 Lidar, that should not happen, right?
Check this attached pic, red is 30 degrees angle and blue is 0 degrees (nadir).
Hi @decones This is to be expected as the distance from the scanner is higher at the greater angles and the reflection on the higher angles over a flat surface will create a “glancing blow” like that of a flashlight. If it catches a perpendicular surface like a vertical wall there shouldn’t be a difference but scanning flat land will create the “glancing blow” which can cause the inaccuracies you are seeing. If you have access to the Rock Academy, we discuss this in more detail here: Angle Gate FOV.
I run mine at +/-45 to 50 degrees on the gate and maximum distance of 85 - 90 meters and see very little fuzz other than some of the curb but that’s to be expected even with the scan gate narrowed. I clean all that during post. I had this same issue you’re having several months back and rock fixed it with an update to the desktop software. I’m assuming you’re running the latest version of desktop and on the R360…
Thanks Jared, I did reprocess the LAZ file using -30/+30 and things got way better.
I tried to watch that video, but it seems to be a paied tranning.
Hi Josh, thanks for you reply,
In fact, I’m not using Rock Desktop, I’m using Inertial Explorer to process the trajetory and then using PCMaster to export the LAZ. The only thing I think I could try to get a better data woud be uptade my R360, still with the factory default firmware, should I give a try?
Cheers,
Andre
Yes, we would recommend updating to the latest firmware. If it doesn’t seem to take you may need to update to each firmware release, working your way up to the latest.