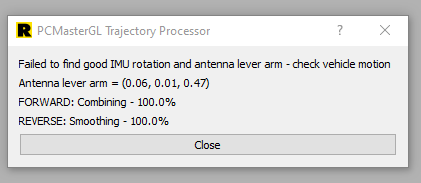
Trying to post a corridor flight from yesterday and running into an error in Trajectory Processor. “Failed to find good IMU rotation and antenna lever arm- check vehicle motion” Can someone explain what this error is indicative of? I’ve also a screenshot of the LAS generated from the RTK project file in the comments to help troubleshooting efforts.
Performed 2 figure 8’s and a high-acceleration out and back before starting the mission. I’m thinking the “waypoint” mission planner on the Crystal Sky might be the culprit as it wants to stop-start at each waypoint. Does anyone have a better suggestion for running missions on the Cendence/Crystal Sky for the M210?
 !
!
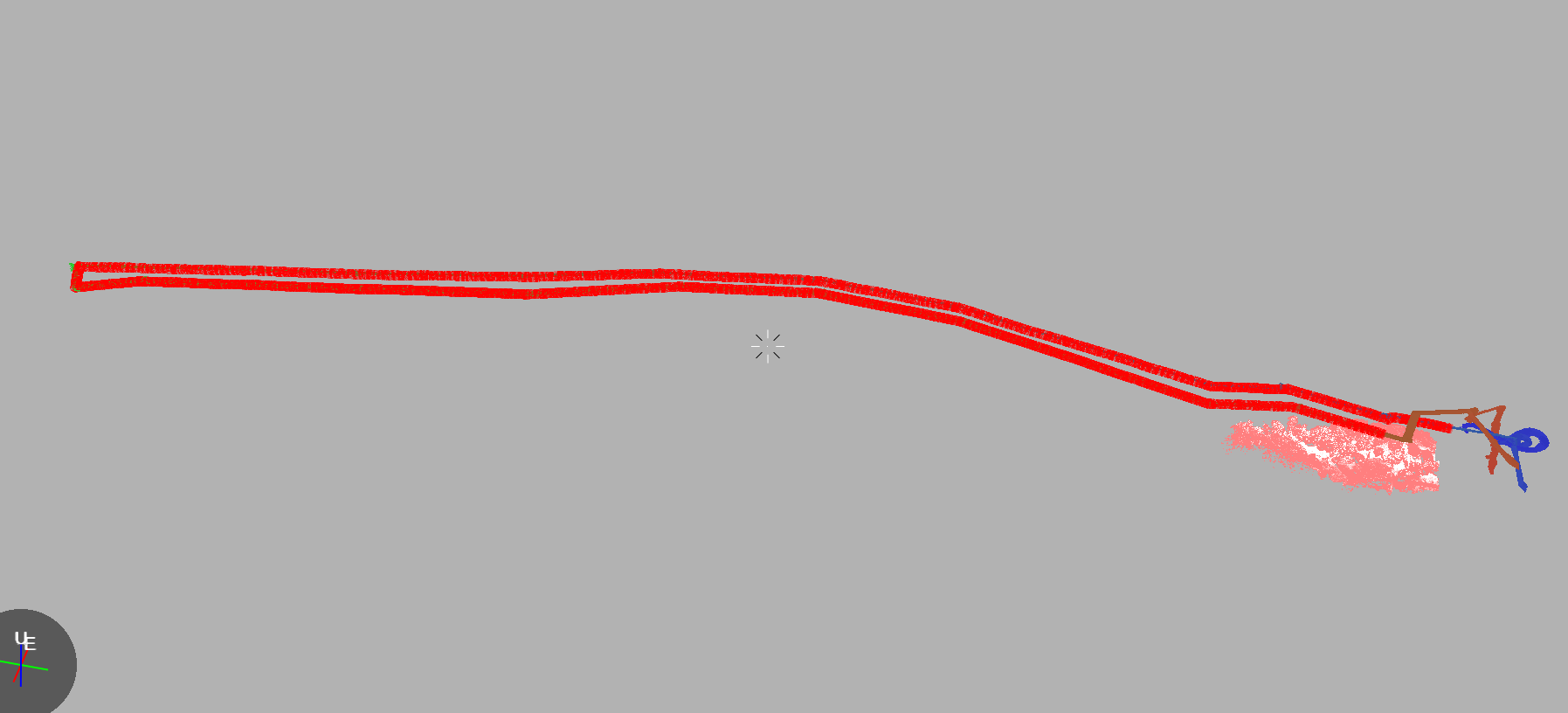
LAS generated from the RTK file on the flight.
Thanks Anton, I actually got back out there and reflew this morning. Figured that might have been the fastest solution rather than digging through trying to salvage the data. Another colleague also mentioned the reverse flight at the landing zone and that was more than likely the culprit since I am used to landing oriented forward with my body.
For anyone that may stumble upon this down the line I was also able to get Litchi loaded onto the Crystal Sky via the Amazon App Store, which will greatly assist in creating 1:1 data comparisons with our Geocue 410 unit as well as programming those figure 8’s in.
Thank you for the response!
Looks like you got to the bottom of this one already.
In regards to the Crystal Sky and the M200 series, you can (as you’ve found out) sideload apk files, but they are less than reliable. The CS will crash with DJI Go 4 so why would we expect it to work well with a 3rd party app.
My solution is to simply use iPads for mapping. Map Pilot Pro is a great app, with a slight learning curve, but once you get it dialed it is one of the best. Litchi is great, but you have to program missions via waypoint and often use another app like mission planner to create the waypoints. Again it’s a matter of personal preference. The one that does NOT work is Drone Deploy, as when you select a custom camera it will go to the first waypoint and just sit there. Hopefully we’ll see some updates in the near future and this will get easier, but at the moment that’s what we’ve got!
Fly safe, thanks for posting!
Whatever’s stable with the cendence controller on the 210. I’ll toss the iPad on tomorrow. Got the 210 shipped over just to field test the R2 so learning a whole new bird on the fly. Thanks for the crash course! Idk why I didn’t just plug in the ipad two weeks ago. 🤦
I sometimes use the Crystal Sky to start the M210 and check all its settings in Go 4. Then once I know it’s calibrated and good to go I’ll just unplug it and plug in the iPad. Often things like compass calibrations and updates simply cannot be done with anything other than Go 4 so it makes a nice workflow to ensure your aircraft health on each use.
Well, the same thing just happened to me… and it was in the last few moments of the flight, I overshot the LZ and “reversed” into it.
New rule with Lidar: No backwards flight. Ever.
Is there a fix for this limitation? Or does our IMU simple “freak out” going backwards?
Thankfully, I made this mistake in training.
LiDAR = enemy of fancy flying.
1 Like