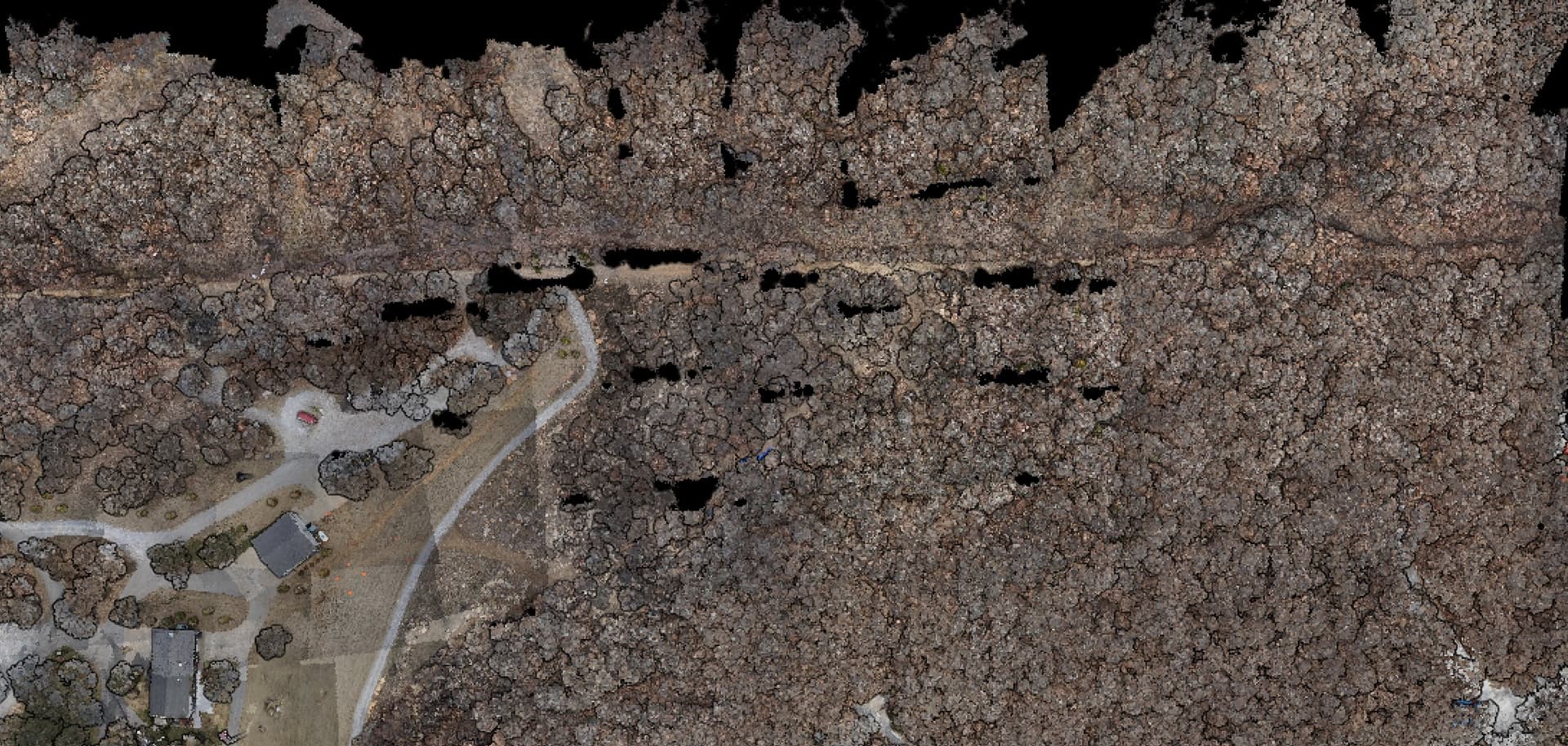
I flew a job the other day that had about a 300 ft difference from one side of the project to the other. Using the new terrain assist feature, I flew the job no problem. In the office today, I went through the whole workflow and upon viewing my PC on the Cloud, I noticed some rough “boxes” missing their coloration. I am trying to nail down why this happened.
My running theory is with the steep slope the drone was working down, and my frontal overlap being set to the recommended 10%, the points were captured, but a photo was not able to see/capture that patch of missing color.
I also noticed, when the drone was working the “downhill” leg, in an attempt to stabilize, it did a “bucking” motion and continued would on. This happened several times along the “downhill” leg, so thinking this may have secondarily contributed to my lack of colorization.
If anyone has any experience with this anomaly, some information on how to fix this would be awesome (even if that’s only for future jobs.) Thank you!
**there are points in these black spots, they are not just “blank” areas. There is also no standing water present.
1 Like
What flight planning software did you use? I have not seen that motion on terrain following on DJI Pilot 2, but did notice it on Pilot 1 last year. The frontlap in the software doesn’t matter if you manually set the speed, the manual speed setting is overriding the frontlap. The camera in the unit takes photos on a set interval regardless of what the flight planning software is set to. This should like a situation where elevation change effected the width of the scan from the hardware, and due to the overlap setting it just had some small gaps. It’s just the slight difference possible with the area of the photo FOV and the LiDAR- they are almost exactly the same but not 100% and rarely ever matters- this being an exception (possibly).
Just the Pilot 2 app on the controller with the new terrain follow feature (No RS2 head). It was a little breezy (~15mph + Gusts) so I figured the “bucking” was a biproduct of the drone descending and catching unexpected wind, bucking, and then stabilizing.
I have been manually setting the speed to 13.9mph as recommended, but I did not know the speed overrides the frontal overlap params. I agree with your theory here and what I was thinking happened after seeing the missing coloration. Thank you for the feedback!
Would the potential “correction” for this issue if it shows up again, be to just reduce the speed by 1 mph, in hopes to allow the camera FOV to have a better chance of matching the LiDAR’s?