I have a downloaded ugcs and have a mission planned but I cannot for the life of me get the controller and laptop to connect. Controller can see m300 but not laptop. I have gone over all docs and finally just email logs to them. I also have a mission in the pilot app on controller but wont account for elevation. I am in the middle of nowhere so no cell or wifi. I need solution to be operated locally.
Is there an alternative to ugcs? I looked into the dsm import but don’t know how to clip geotiff down because it’s just a massive file.
You can also try exporting the route to waypoints in UgCS.
To receive the best support regarding their software you are going to be much better suited asking them directly. I imagine they can help you resolve your issues with more exacting results.
ugcs can be frustrating to connect but once flying i feel the most confidence in it for terrain following, especially because you can load your own dtms and dsms (90m srtm doesnt cut it in rugged terrain, especially when you need to maintain a closer distance with lidar).
best luck i’ve had in the field w/o cell service is to use a cheap tp-link usb-powered router and connect to the hotspot. sometimes i have to close and open ugcs several times but it eventually works.
Thanks for the reply. I finally got them all working. Can you elaborate on the tp-link usb-powered router?
Also, what method do you use for the calibration of imu in the beginning before you start the mission?
Do you program in ugcs? (fly straight then figure 8 in ugcs) or do you manually fly in pilot app and the load ugcs? What is your workflow.
There are some even cheaper ones that would probably work too. It just provides a steady internet-less wifi network for the laptop and smartcontroller or tablet with ugcs for dji to connect to. I connect to a portable battery pack. I had issues with my phone’s hotspot frequently shutting down when i dont have service. I use the ugcs for dji embedded on the dji smartcontroller unless I really need to see the mission well on the android device. Too many devices! I highly recommend having the laptop in the field so you can adjust your starting point or anything else in the mission, the android app is pretty worthless for mission planning.
I fly the calibration manually then enable the auto-mode, usually from the laptop but you can do from the android app too. Sometimes I fly manually to the first point as well to save time and battery. You can fly manually from withing the ugcs app, no need to use dji pilot except if you need to calibrate for center of gravity (if changing from a different payload). you can even calibrate the compass withing the ugcs app.
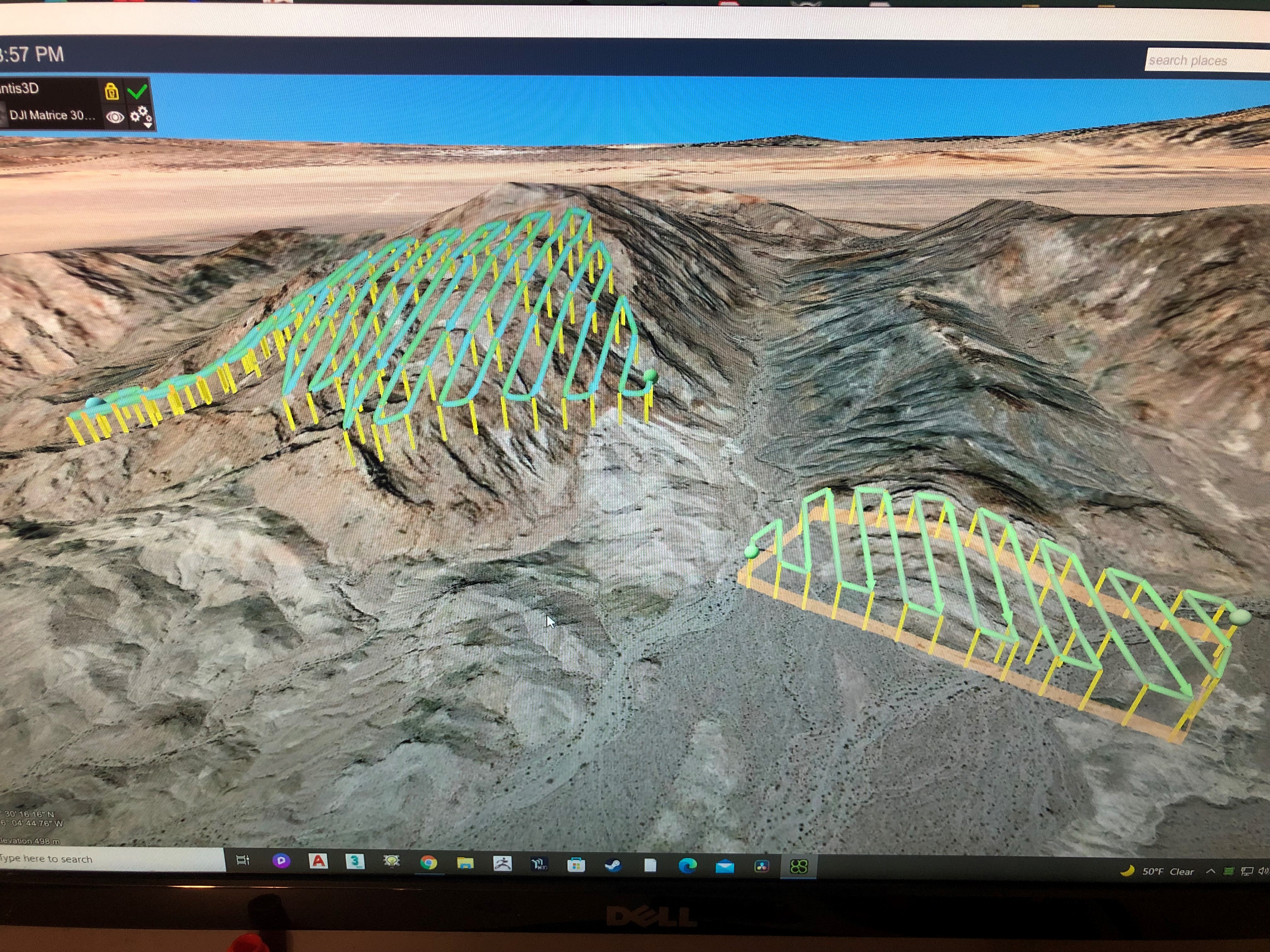
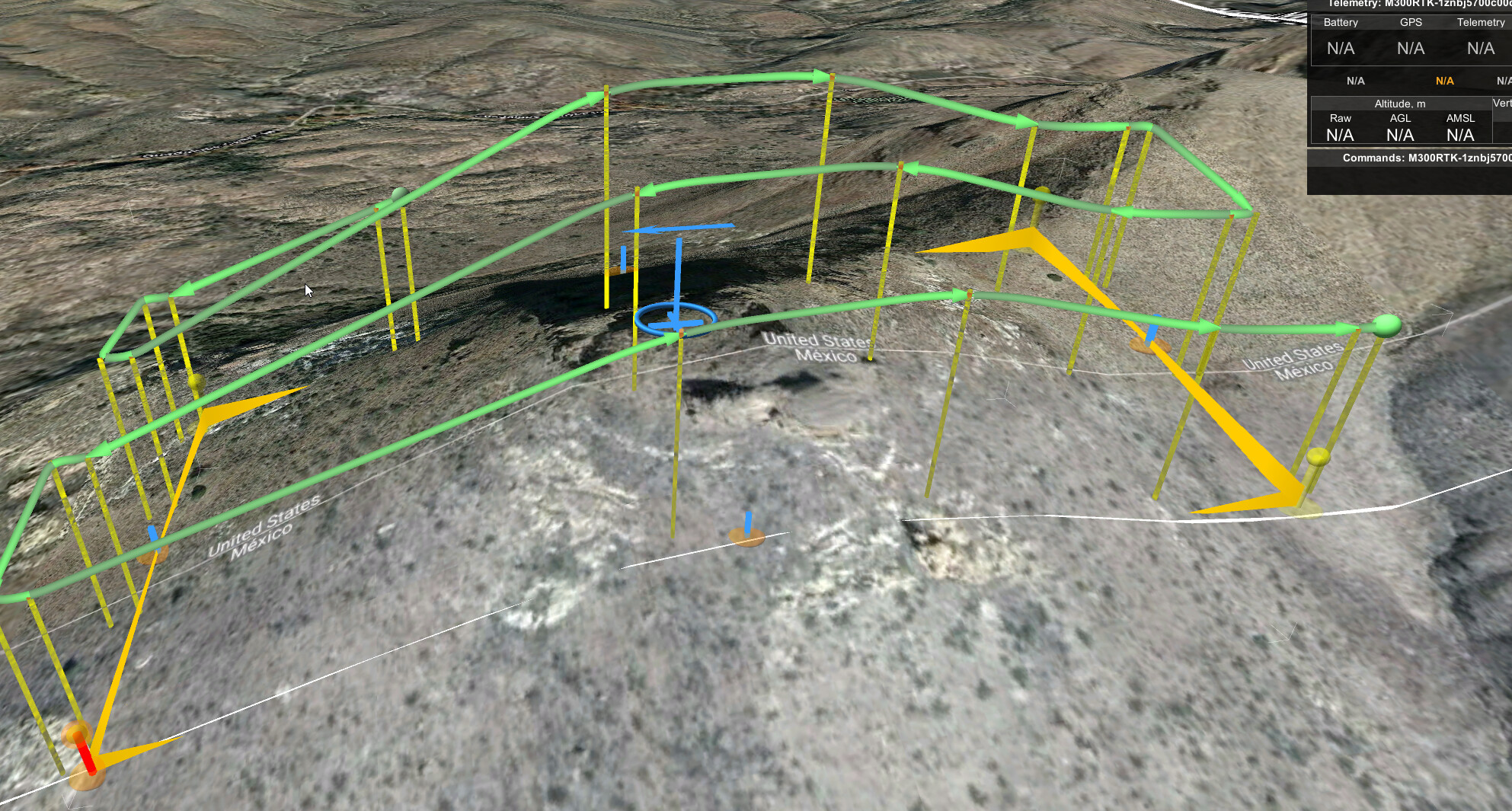
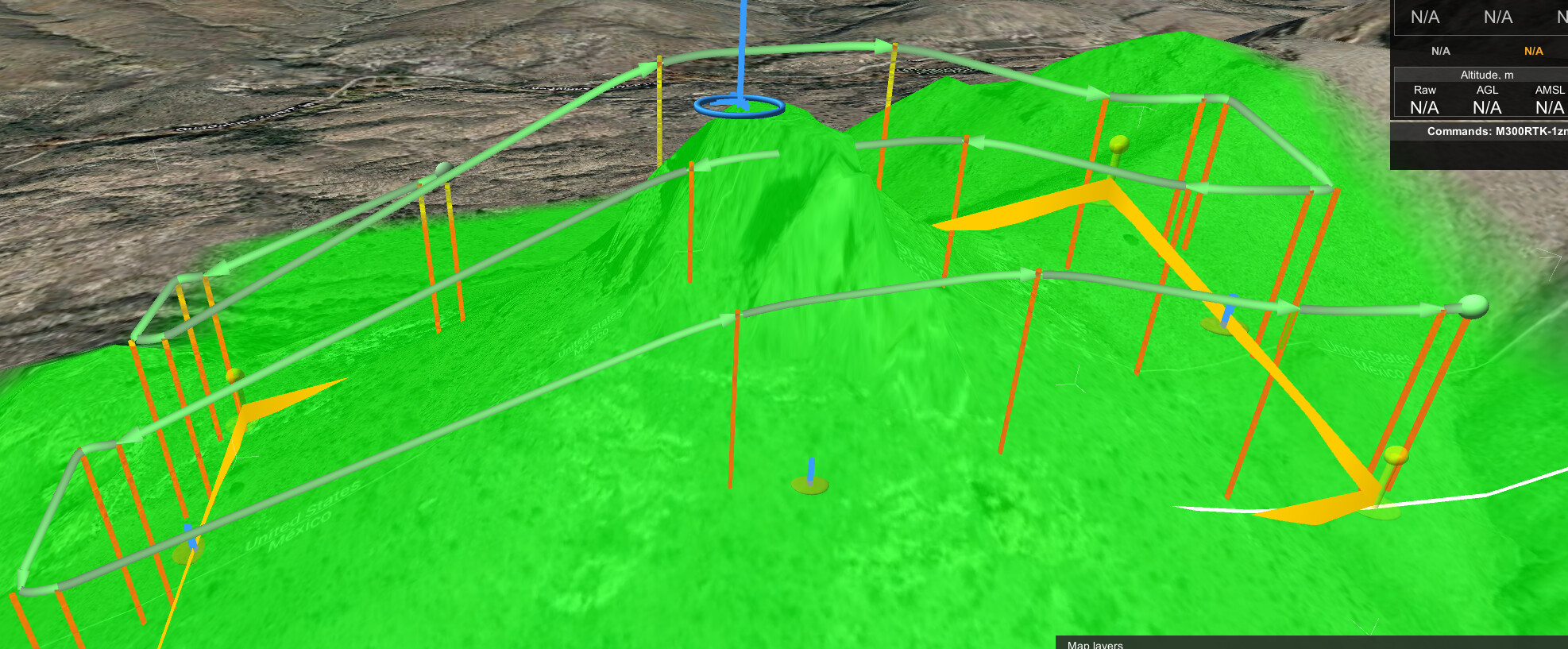
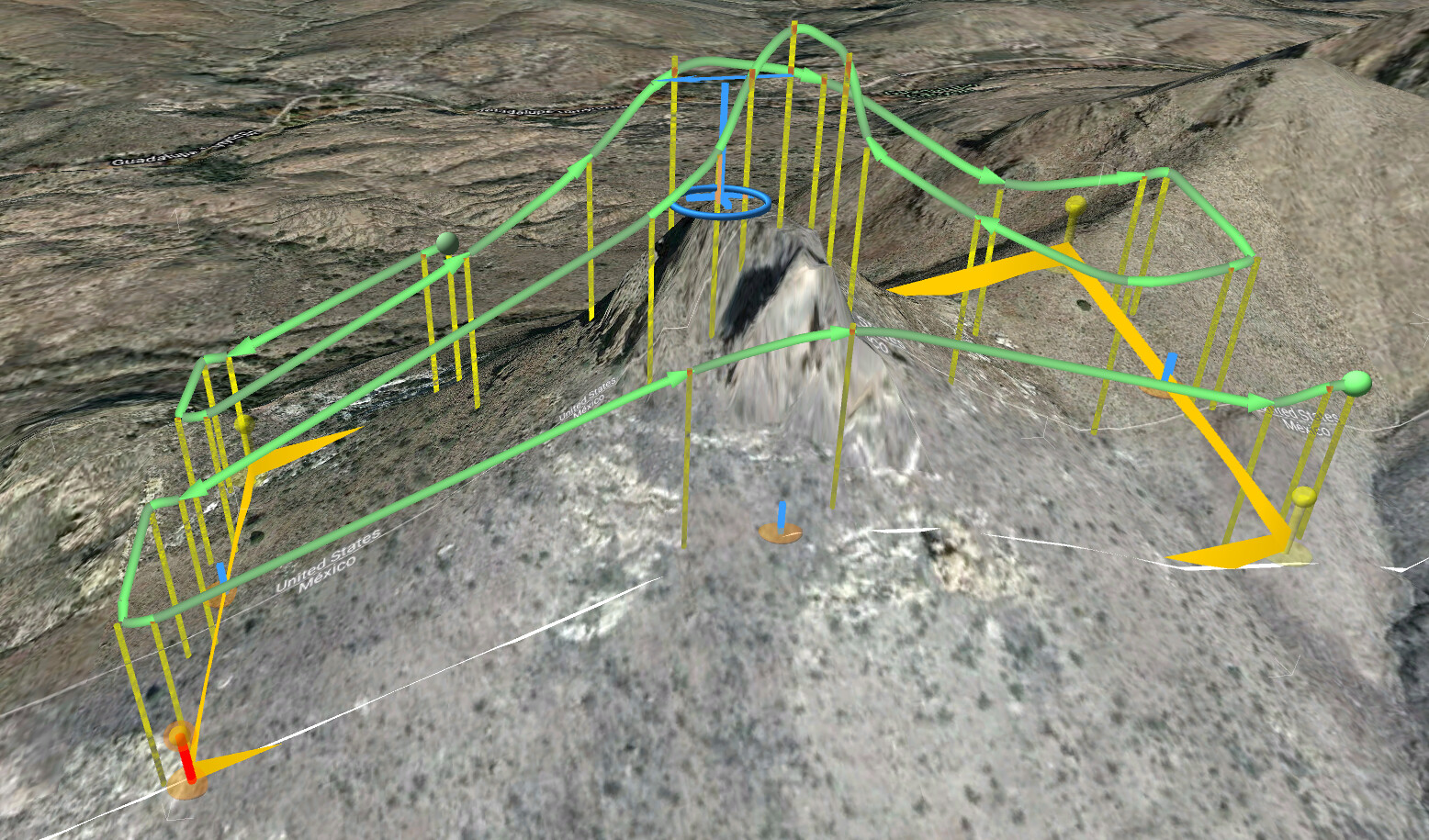
Also for the custom elevation layers, here is what would have a route would have looked like using the srtm elevation data vs lidar. just make sure to adjust AGL tolerance some so you’re not bouncing around too much.
check usgs 3dep or opentopography.org for public datasets. doesn’t even need to be lidar, there are better DEMs out there than the srtm90m. Its not necessary to use for flight planning but i like to at least use as a check.
You can also fly high/fast and make your own DEM using the Surveyor in the Rock Cloud.
At $2 an acre it’s not a bad deal if you really need to drill deep and have confidence in mission. Well worth the time/energy/cost if you need the best data possible.
I.E. Fly once at 200’ 15mph and get your DEM. Then fly it again much lower/slower for extreme point density and accuracy.
I just had this error today. I reset the laptop, reset the M300, I even reinstalled the android UgCS on the controller. It would not connect. I used it the previous 5 days in a ROW doing photogrammetry with the P1 and zero problems. I ended up trying to fly the mission manually and screwed up somewhere because all I got from the R2A was the data file.
What did you end up doing to get the RC and laptop connected?