What is the Lidar is the product using? How many beams? Have you verified the mapping results? Is there any KPI or ground truth you can use to evaluate the mapping result?
How do you handle the motion objects in the scene?
What is the size of a generated map for a 1000 square meter scene?
Thank you for the great questions! The R1A uses a LiVOX LiDAR sensor. This system uses a single laser beam that is steered through an approximate 40 deg Field of View. The mapping results are an accuracy and precision of 5cm.
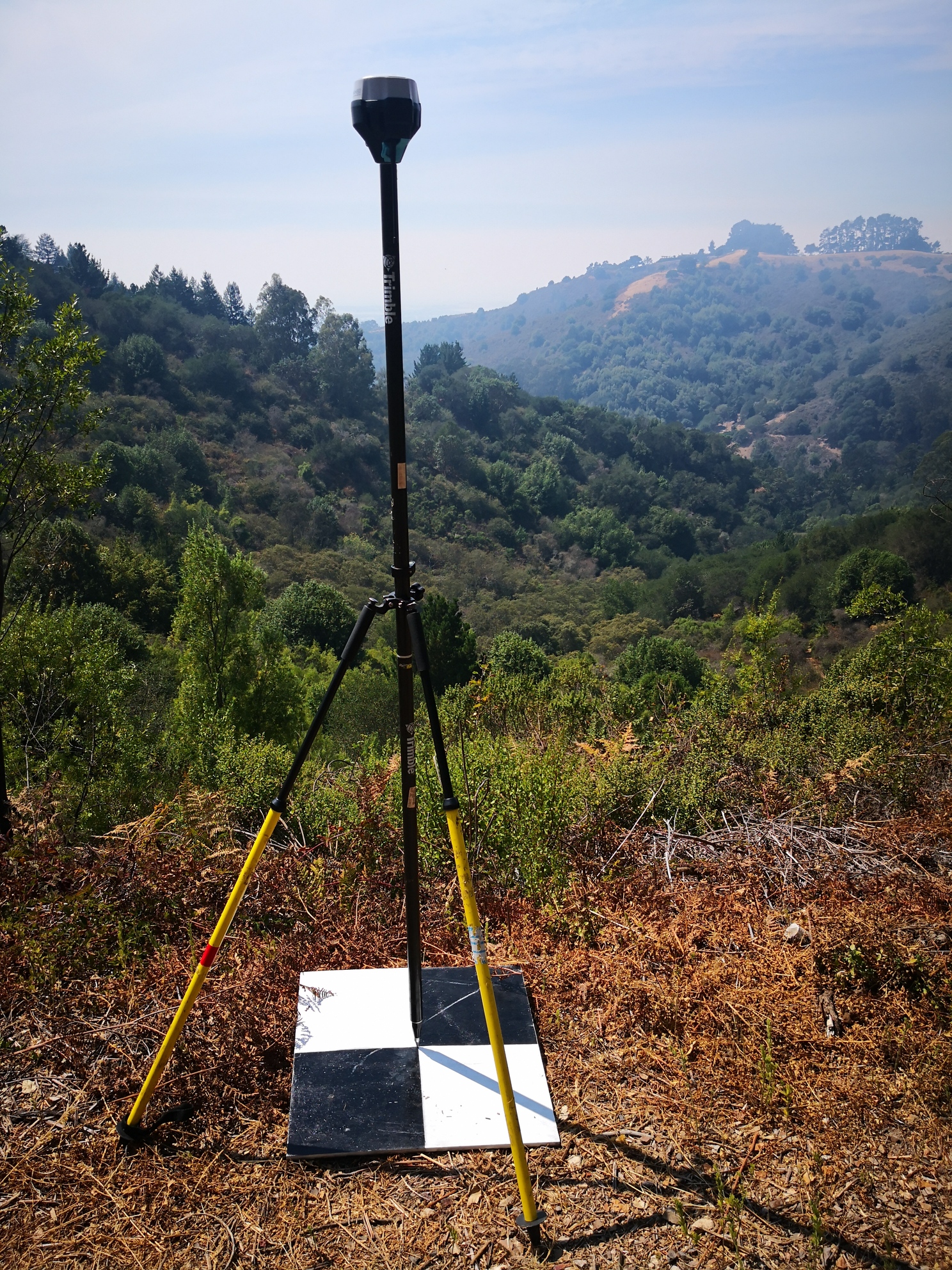
This dataset contains 6 independently surveyed ground control points using GNSS RTK system and the OPUS precise point processing. The Surveyed points and aerial targets were captured at sub-cm accuracy. Here is a photo from the survey -->
From here we compare the independently surveyed target to the ground classified LiDAR point cloud to verify the global accuracy of the dataset. In this dataset our accuracies were very good (2.8 cm)
As for the motion blur, this is not a significant factor when using the ROCK cloud post processing. Our ROCK cloud computes a very accurate trajectory for the R1A sensor and directly georeferences each point. This is in contrast to a SLAM (computer vision) based point cloud registration, where a whole scene needs to be captured then compared to the next scene. This motion smearing in LiDAR SLAM is comparable to the smearing of image pixels in the Rolling Shutter effect.
Lastly, the size. This really depends on how high you fly and how fast you fly. We provided recommended flying parameters for best results, but sometimes 10 or even 15 cm accuracy is sufficient and low density points. For these cases you can fly very high and very fast and vastly reduce the data size.
A good rule of thumb for the R1A — every 0.125 sq km is about 2 GB of data!
Hello Harrison,
I’m a new member who is taking an interest in LiDAR. I first saw your videos on mapping on your YouTube channel (great and informative videos). My Questions: What GNSS Base & Receiver System Brand or Make do you recommend? And what is needed to get started in mapping, construction or home builder site projects? I noticed on your video you have two (2) the base and the receiver - are there more tri-pods that are needed or set up elsewhere?
Thank you,
Eagle1
We are currently using the Emlid Reach RS2 receivers. We have been happy with the performance and ease of use…not to mention the price!
We bring two RS2’s to the job site. One is setup as a base station and we use the other to collect ground control points while getting gnss corrections over the Lora radio from the base.
Thank you Alex, and yes the information you provided is helpful. I also had another question - does an operator also have to be a certified surveyor or photogrammetrist in order to provide a customer with a property survey? And if so, what schools or certification programs do you recommend that are thorough and can be quickly obtained (if any exist that meet these two conditions)? I assume an operator would have to posses both a surveyors license and an FAA Part 107 before considering the purchase of a R1A.
Thank you for your time and expertise.
You do not need to be a certified surveyor to use the R1A. Normally a customer will hire you to provide the LiDAR data and a licensed surveyor in that location will review the data (along with their GCP checkpoints) and they will stamp it (if it needs to be stamped in that location).
Hi Alex, I was watching a YouTube video featuring a mission using what looks to be Aeropoints. What would be the determining factors in choosing to use either Aeropoints or the Emlid receivers when conducting missions. Would Aeropoints be preferred over the Emlid receivers or vice-versa?
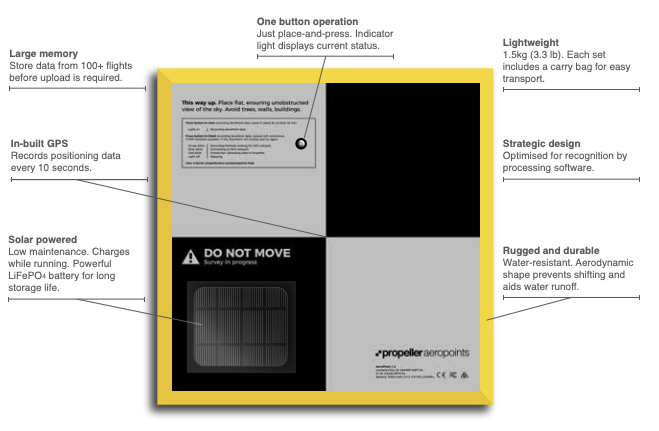
Aeropoints are fantastic for collecting GCPs out in the field. However, as shown in their documentation, they collect GNSS observations at a rate of 1 every 10 seconds:
This is not sufficient when doing ppk post processing for LiDAR data. The Emlid Reach RS2 allows collection of GNSS data at 1 observation per second (or faster). This allows for a better PPK solution and is why we recommend using the RS2 as a base station.