I’m attempting to assemble the pieces for my first project in the cloud.
Because of issues that are suspected to be caused by IMU disconnect, we had to re-do 2 major sections of the survey on another day. Therefore the base station was at a slightly different location but there is some overlap of point clouds.
I processed and uploaded a 180 acre section. My antenna height is known, however I didn’t adjust it in PCMaster, I figured I could adjust it in the cloud as per the demonstration videos. I have 2 control points in this area.
https://cloud.rockrobotic.com/share/3ef4e774-df36-4365-a331-254240dba74f
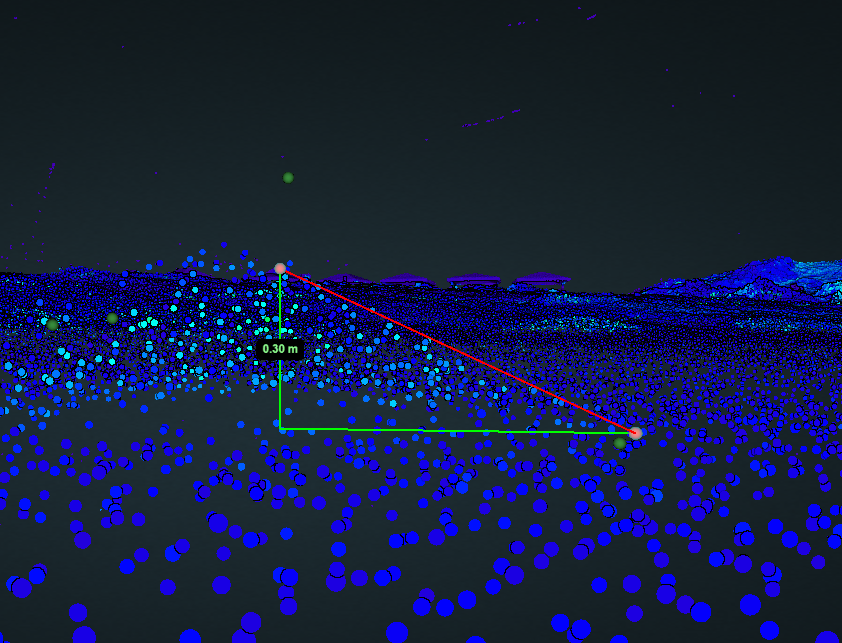
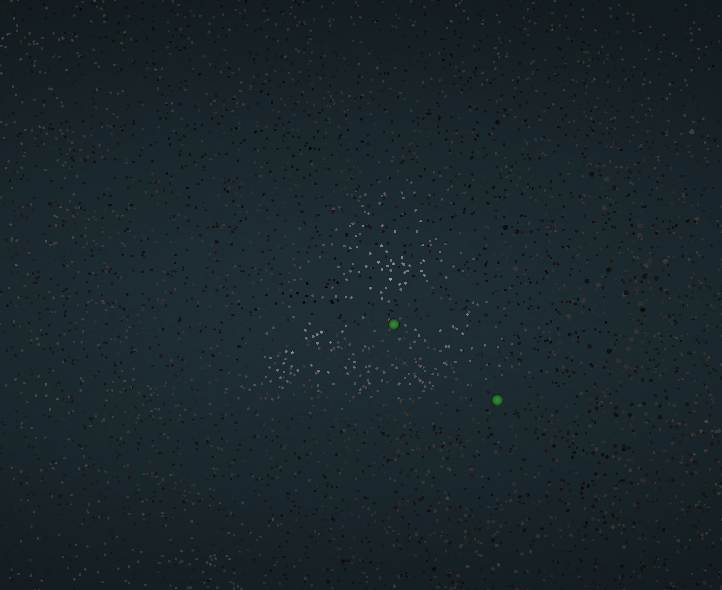
The ground has fairly significant fuzz because the control points were painted on low grass and the flight was performed at 120m AGL … I don’t know how typical this is because this is my first project.
When I adjust the point cloud so that the control points are both within the “fuzz” in the Z direction, the X and Y are still significantly off. If I move the point cloud so one of the control points is as close as I can get it, the other is out in the x,y by a lot (0.7m). (yes, there’s someone parked almost on top of the one control point but there was no way for us to know this before the flight. This was an area we had to re-do the next day because of the IMU issue)
Is this a reprojection error?
I shot the control points using NAD83(CSRS) / UTM Zone 17N so that’s what I set the reprojection for.
The geoid model that is in the rover we used was the Canadian HT2.0 model. This isn’t available through Rock Cloud as a selection in the vertical datum. It’s supposed to be compatible with CGVD28 which is what I selected. Would this be the cause of the X/Y errors?
Could the errors be caused by the IMU malfunction even on the flights where all the data was gathered?
I’m not sure where other sources of X/Y error crop up… distance from base station? (this was probably around 2.5km at the farthest point) Altitude? is a .7m error in X/Y typical at 120m?
I would like to get this survey as accurate as possible given the circumstances. Any assistance would be greatly appreciated.
The other 3 parts of the survey have some of the same issues as I’m trying to line them up using the compare feature. If they’re lined up on their control points then they don’t line up all that well in the cloud with each other. Close, but not within the error that I was expecting.