Can someone tell me the file(s) that a client would need for them to produce useable contour lines in AutoCad?
Thanks
Ron
dxf should work for them.
The best AutoCad Civil 3D deliverable would be the surface exported as a .xml. Right now I have found no easy way to accomplish this. This is accomplished with most photogrammetry software such as pixelement, is there some reason this can’t be accomplished with lidar?
Agreed…
Our current process is to take the RockSuveryor ground classified cloud, export it as a 1%, a 30%, and a 95% LAZ and then Tin it in Trimble Realworks then export the sampled cloud and LandXML into C3D. It may need some additional breaklines but otherwise has worked well.
That said, for smaller areas (< ~160 acres) the Tin made directly (the 100%) from the RockSuveryor ground cloud works really well too.
How has the quality of the XML from pixelement been? is it a natural tin or a grid tin?
My process is to take the ground classified LiDAR dataset into Global Mapper. Then export a 3x3 sampled LandXML file (export vector LiDAR format → LandXML)
We are struggling with getting a decent surface. We are creating a .xml in Carlson Precision 3D.
The surface matches our conventional ground topo on hard surfaces, i.e. pavement etc., but the ground shots in the wooded area vary in error from 0.60’ to 3’. It does not appear the ground classification data processed by Rock Cloud is truly taking the vegetation to the ground. What am I missing?
The struggle is real… especially in low brush and tall grasses.
- What’s your point density look like in the wooded area?
- What’s the brush density?
- Method of ground truthing survey within the trees?
- Fallen trees vs rock out crops?
one thing to try is run classification in a couple other programs and carefully check in Cross-X. PS you can upload a ground extracted point cloud to another project in RockCloud, do a compare command, and directly look at the different ground extractions in those problem areas.
That’s where I’d start when facing deviations like that.
We have compared our lidar data against different types of topo ground surveys we have completed. Each one with different size and cover. We get the same issue throughout. The only site in which we got decent data was a open ocean front site. A site we could have used our Phantom and processed the photos and received just as good or better results. If we can’t get consistent ground data in cover, it makes the Lidar data somewhat useless.
FYI - we have also tried Virtual Surveyor and ReCap, same results
1 Like

Nice! well done.
If willing could you share the project with me? (anthony.herman@kljeng.com)
One of the main issues I run into in the woods, is debris or under brush <= ~1m tall. Most multi return lasers can’t distinguish (create additional points) within that band gap. Leaving the only real line of defense (that I know of) being the tessellation algorithms that smooth out the noise or manual classification.
I am definitely tracking with you on this one… if you find a solution mid stream please share. Noise and ground verification are the two key obstacles in LiDAR generally. That said, I’ve flown many sites like pictured above with photogrammetry and still LiDAR works way better and faster in cases like this.
Glad you had control to compare it to… Trust but verify.

Thanks for your collaboration! Screen shot shows how the Rock cloud generated contours are in the bushes and not at the ground. This makes the Rock Surveyor ground deliverable completely unreliable. I will share this project with you.
@mike-DRG can you send me your specific dataset so we can take a look?
@mike-DRG bushes can be very dense and therefore getting light to travel all the way to the ground through a bush can be very difficult. Flying lower and slower over an area with very thick vegetation can increase the likelihood of capturing ground points. If you are looking at a dataset and it would be very difficult for you to tell which points are ground / which are vegetation, then the Rock Cloud algorithms are going to be challenged as well.
We do offer break lining which will take any manually shot GCPs to more closely define the ground.
RE: Surfaces in heavy vegetation
My company is on the receiving end of many “design grade” surfaces derived from lidar. There is almost always some area of the surface designated as void or obscured due to dense vegetation not allowing laser penetration to the ground. These are typically manned flights with some very power and sophisticated sensors. The bottom line is no matter what your approach may be, sometimes you just wont be able to get a reliable ground surface in these areas. We end up doing on the ground survey to supplement the aerial datasets.
1 Like
Understood, but this site for example, is not that dense and small. We flew it slower and lower. If we have to ground truth the vegetative areas then it kind of defeats the purpose of LiDar, we could just fly it with or Phantom and use the photo’s. This appears to be random in nature, to get a good topo you would have to ground truth the entire vegetative areas, so there would be no need to do the lidar flight.
Sure, how do you want me to get it to you?
I have shared the file with Harrison and tag him as owner
Thanks for the share. As a collector and end user of said data… I am happy to collaborate.
On flatter sites like this, one of my initial tricks is to narrow the color bands in elevation coloring to highlight the rough area the ground should appear within. This will show areas of concern.
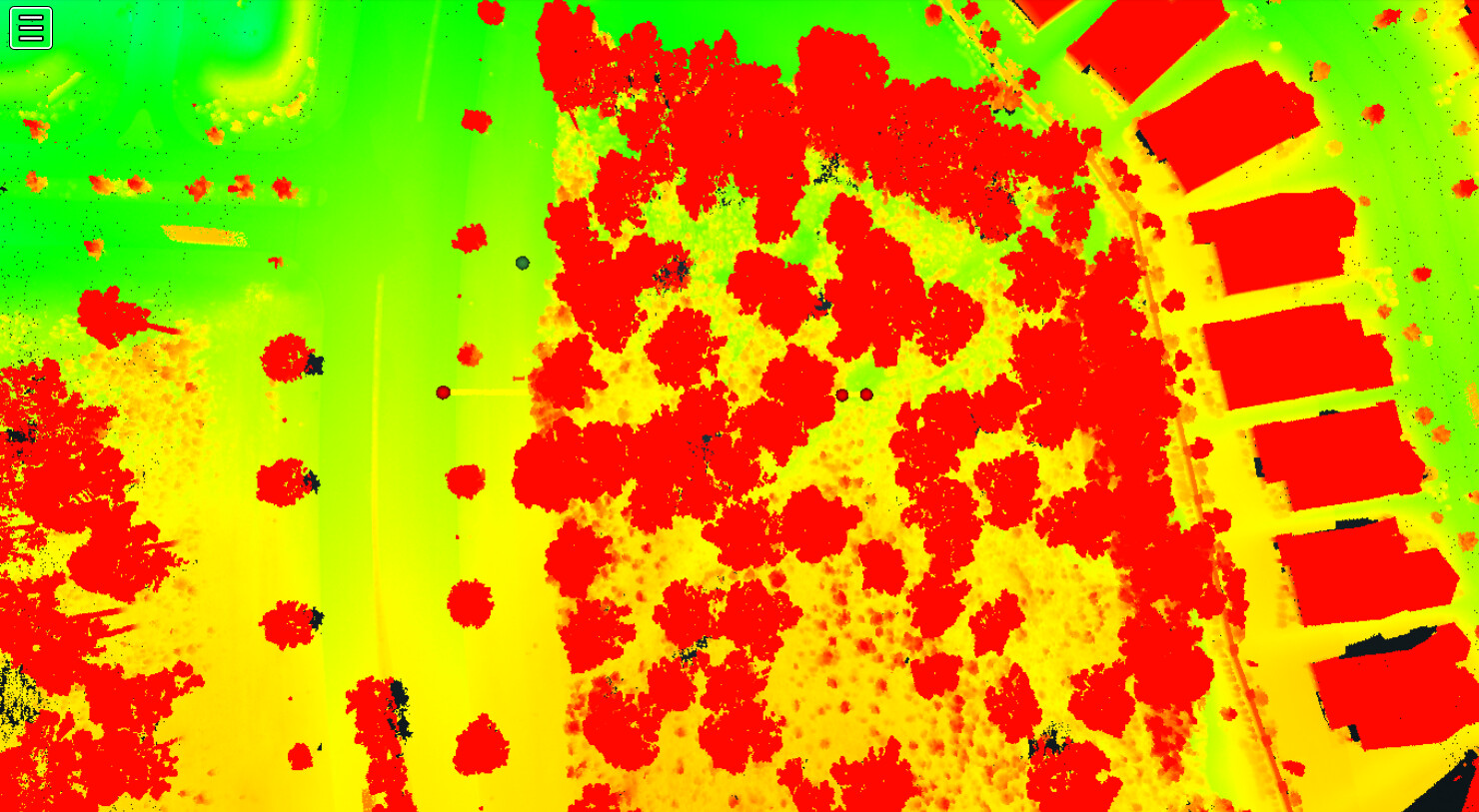
Then (or first if its rugged terrain) I’ll look up from the bottom at a high angle to get an Idea of true penetration. What I am looking for is evidence that I didn’t get a laser through the grass/brush.

Given the very high under brush density here even with your high laser density… It’s pretty safe to say we aren’t hitting the ground reliably. Remote sensing has its limits… line of sight being one of them.
I’d be careful resorting to photogrammetry on a site like this as well… that canopy would likely preclude any reliable data below it. I’ve flown and used many sites like this with photogrammetry, and though we pulled some miracles out of that technology, its not reliable in a case like this. LiDAR has its limits (as all survey methods do) but it was your best bet in getting *most of the data within this area. Most of our collections have: Control, Truthing (separate from control), difficult/precision surveyed points (like a few surveyed points in thick under brush, back of curb, top of RR tracks… ), remote sensing (LiDAR or photogrammetry), and desk survey (to clean up and merge the data into one verified story).
I wish remote sensing was all point and shoot… but there is still an art and science to it.
When I have come across a site / data set like this (after the fact), we either collected additional points or desk surveyed with the points we had and lived with some interpolated triangles in the Tin. Use the RGB and Intensity and elevation coloration to your benefit. Create polygons or lines to show the areas of concern, desk survey within, then delete the errant points in CAD when generating the surface. On a site this small, desk survey would be my goto unless the site is effectively in your back yard… and you can just quickly grab the GPS or total station points.
Best of luck my friend. 
Thanks for your help! We wouldn’t use photogrammetry for the ground, just the hard surface. My point was if we are only getting good data on the hard surfaces then the use of LiDAR to pernitrate to the ground is not what I had expected. This site is really not that heavy in vegetation compared to our area. If we can’t get ground data on this site then we may need to re-access our use. What’s frustrating is the data looks great, the issue is getting the usable data out of the Cloud.