I believe as time wears on and more of us are playing with our R2As, we are going to be having many conversations about the point cloud colorization.
Please NOTE that the actual Lidar data (best view in “intensity” view, or black and white) is very good and that is where the money is. The colorization is so very cool and will let individuals better visualize the data they are seeing (and it looks cool). However, the camera won’t keep it’s factory settings.
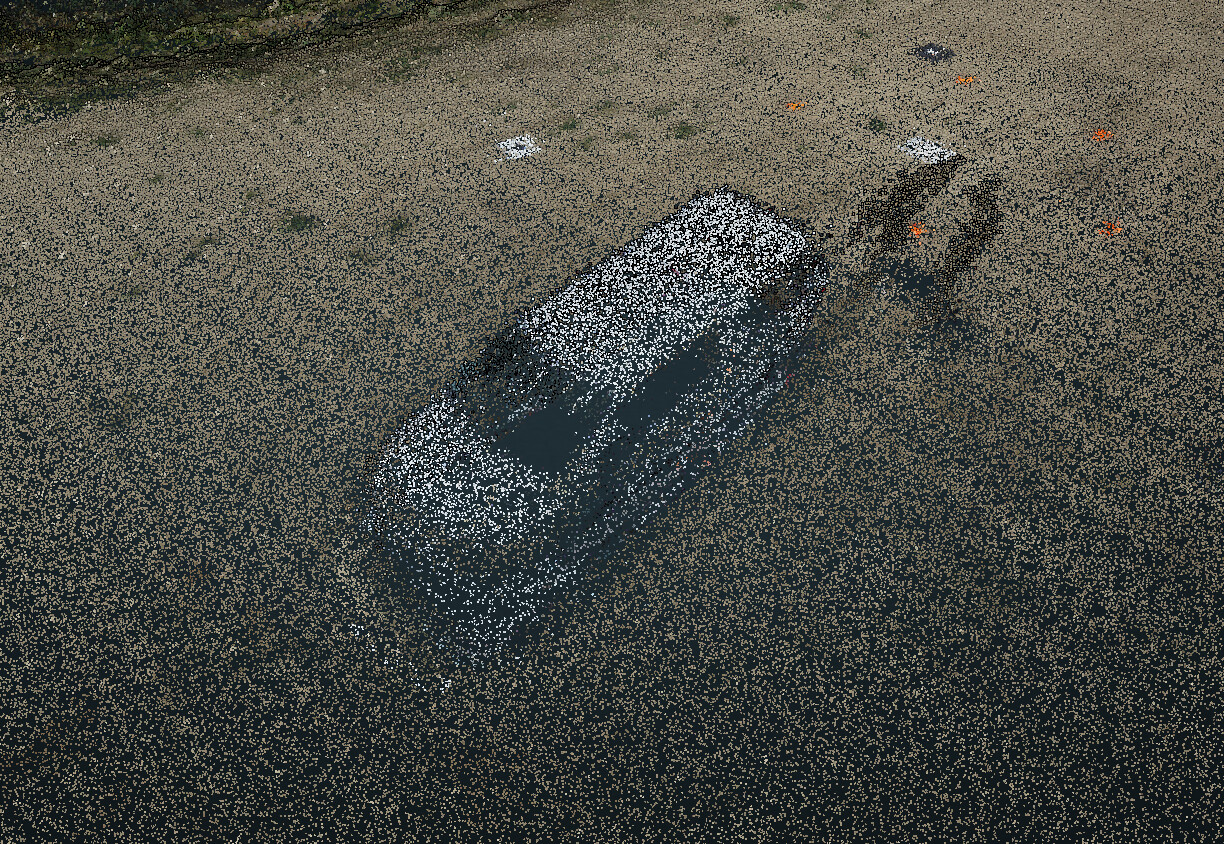
How do you know your out?

It is very clear in the above image. You can two windscreens (black rectangles) and the dirt (tan colored points) being painted onto the truck.
Okay… so I open PC Painter and adjust my nadir images to best fit the model. This is where I need help. Specifically, what do the Rock Engineers look at/for when they are aligning their data sets? How do you know that it is okay, good or perfect?
I typically adjust my IMU-Camera angular settings first. Remember to record your base values, as it is easy to get lost when you twist several variables at a time, wait for your computer to do some magic and answer the latest text message.
This is my result after two attempts:
It looks way better and the colorization of my targets is now almost perfect to the “intensity” view… and I now only have one truck. But you can still see “imperfection” on the sides.
I took this success and applied it to another job:

This re-alignment of the images to the lidar data in PC Painter went well (although my variables keep changing). I see there is still room for improvement.
- What “benchmarks” or “clues” do you use for best success?
1a.: I also use roof lines and road/sidewalks… again, what tells you when it’s ok, good or awesome? I have read the online guidance material, but it still leaves me to question. - Which setting variables to you play more with? Less with?
- Is there a way we can get “auto” adjust… like aligning our data with GCPs… there should be a similar feature for the colorization?
I like the color feature and I believe the skills we learn adjusting the RGB to the Lidar will be useful for other calibrations we might need to perform later. Nice, accurate color is a great tool!
