Imagine a corridor with a length of 20 km and a width of 400 meters, how many segments can you divide it into to keep the data quality high? How many GCPs per segment?
Imagine that there are no line of sight regulations, or imagine that you have been granted for BVLOS.
You are using a M300 with a L1 sensor over hilly to flat terrain, flight altitude 70 meters AGL, accuracy expected 7 cm on Z axes and 14 cm on XY.
“Over 30 minutes, at a speed of 13 m/s, a flight altitude of 100 m, with a side overlap rate of 10%, point cloud density > 100 points/m2.”
During that time 2 square kilometers were captured.
So with that in mind you should have no issues capturing at your defined parameters.
(20 km) x 400 m = 8 km²
Simple math:
30min per 2 km²
~2+ hour capture at 13m/s and 100m AGL w/ 10% overlap
You could estimate 3+ for doing it at 70m AGL
The one thing that I question from your post is the size of your aerial targets. That seems pretty small for those flight parameters. It might be worth using larger ones, or flying lower/slower when you pass those targets.
We just finished a 5 mile corridor in the middle of nowhere, Alberta.
We flew at 60m AGL with a speed of 8m/s.
This produced more than enough data for contours and engineered survey data for our client.
For GCPs, we shot 3- 5 points every 1/2 mile (virtual control) and we used two targets for alignment and position.
We use PPK for our data correction. It is the best method and the most accurate.
For this particular job, I set up in the “middle” so I can fly out and back for each segment. For this job, the ROW was small enough that one pass “up” and one pass “down” captured all the data very well.
The maximum length of a segment is as long as you want to make it. Consult your location’s flight regulations in regards to VLOS/BVLOS flight.
Our max distance from the base station, for this flight, was 6.4km (4miles). You must watch the distance your “rover” goes from the “base”… there are limits! You will know you have reached these limits when your data looks like it is “delaminating” or you have multi-surfaces everywhere.
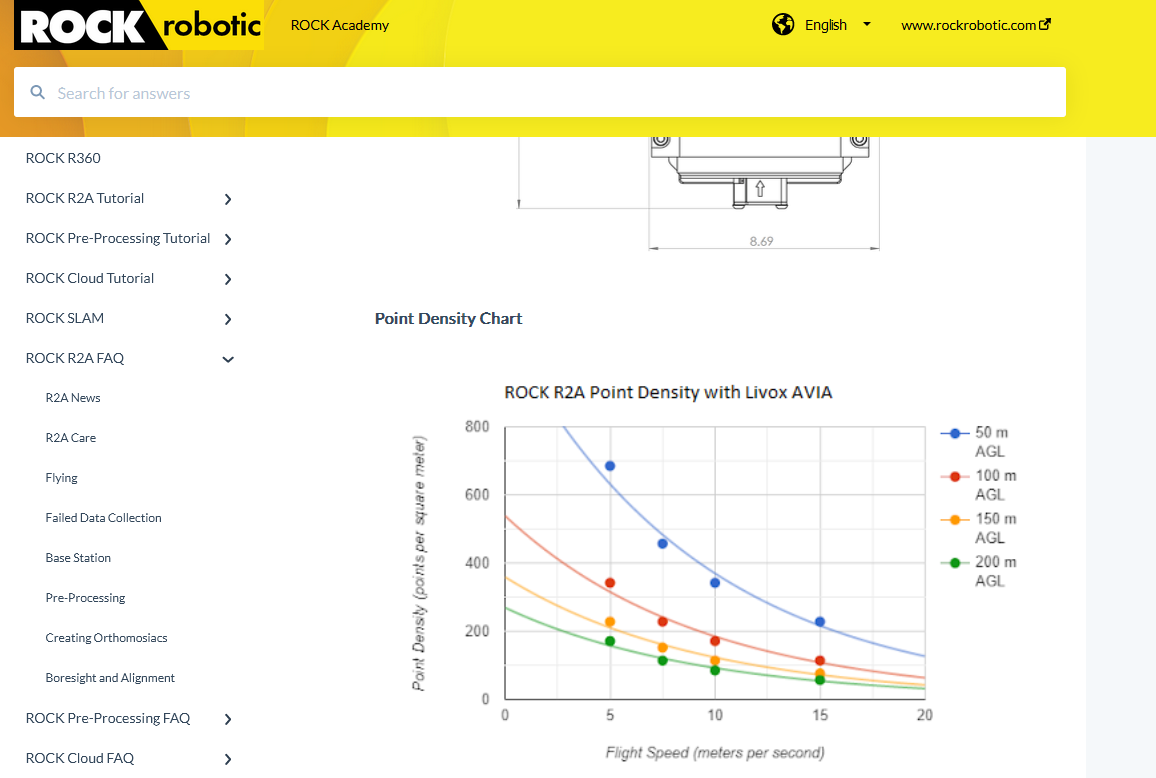
RR_Flight_Ops I navigated to the page that you listed however didn’t find where it would allow me to calculate the point cloud density. I have a potential project where the customer is requesting that the points per square meter for a transmission corridor have no less than 100 points per square meter. Is this possible with the rock lidar R2A? Typically we fly at 5.81152 m/s and a flight altitude of 60.96 m. But would be nice to see a tool that would allow me to enter the desired PPSM and it put what the flight parameters should be.
again I come back to is the R2A capable of 100 PPSM on a transmission corridor as i know those can require higher altitudes. I also reviewed several rock demo projects and for the ones that were listed the highest density return was listed as 106 points per square foot to which I don’t know what that equals out to for PPSM.
Did you use just 2 physical Targets for the entire 5 mile corridor or every 1/2 mile along with the 3-5 virtual targets?
I am doing the same sort of corridor mission this week, but it is 28 miles. I am trying to figure out how many physical targets I need to paint on the road along each section. And how I will be able to survey in the target without getting out of the Emlid Base/Rover range. Im thinking I may survey the targets for each flight route sparely.
I’ve broken the mission into 13 different flights. Flying roughly 2.5 miles in each battery pack. 20m AGL to get the best looking photo resolution that the engineer is requesting and flying at 2.5m per sec.
Curious on what you think about GCP placement for this project.
You have your missions broken up nicely, I like to keep my gcps at the head and tail (easy to match up the data sets later). You could add one or two virtual in the middle if you want.
20m AGL @ 2.5m/s seems rather odd. Almost dangerous, but you I’m sure you’ve scoped your route and such a low AGL won’t see you running into homes, businesses and light standards. 20m AGL where I live would cause you accidents.
I agree with the Flight Parameters not being the most ideal. I am mapping a long small width road out in the middle of Palmdale. I don’t have enough time to do multiple passes, so I am flying directly over the center line and doing one pass. There isn’t much out here and the only thing I’ve had to adjust for is one stretch of high power lines I had to fly up and over. To keep in range of the M300, I am flying from the back of my truck ahead of the drone out of the R3 Pro’s view.
I changed to 25m AGL @ 3m/s. We were having issues with batteries and heat that was causing me to have to cut the flight in half during the middle of the afternoon.
I did test these parameters before starting. The point cloud looks great, and the images are up to par for the client requesting them. They are mostly concerned with the cracking on the asphalt so it seems to be ok. I wanted to do a triple pass for the asphalt, but time does not allow for it. The ortho looks great on the road, but there are some issues along the shoulder that seems to be good enough for who needs it.