Are there any tips or suggestions for aligning imagery from the camera to the lidar model?
I am trying to get vertical surfaces as close as possible, but I find it challenging to align the images to the point cloud. It seems that what is good for one image does not apply to the next, or the “best” fit is still off the mark.
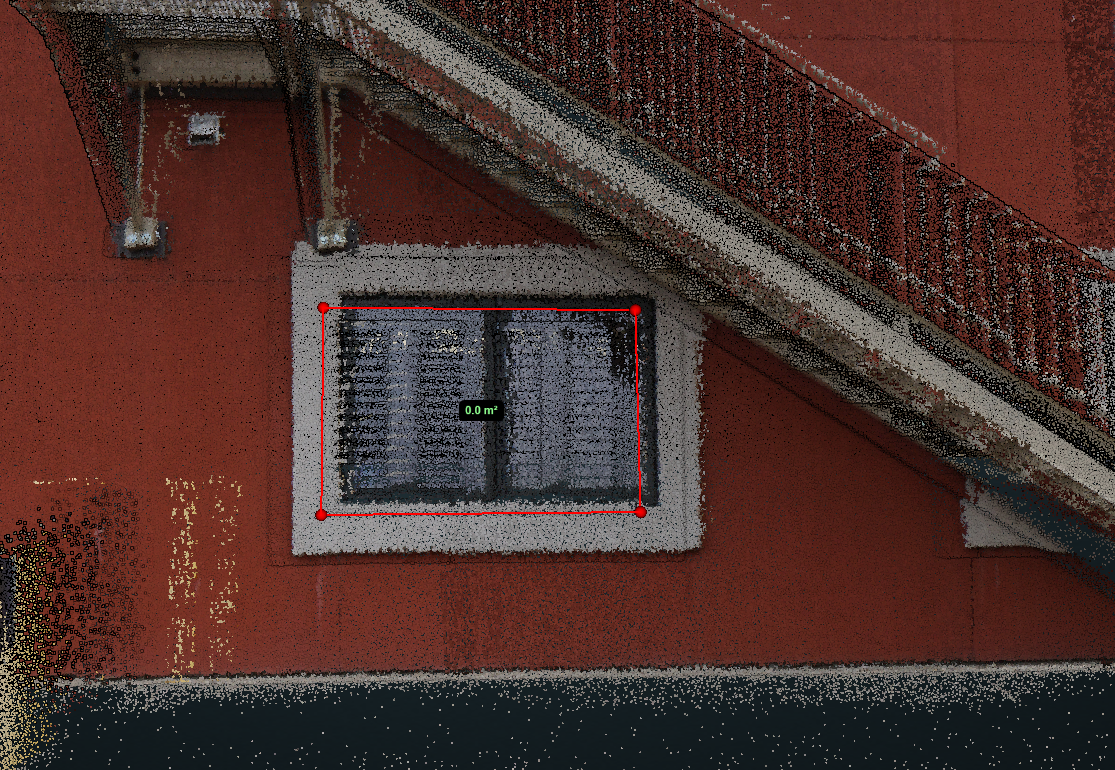
The red polygon is traced from the “intensity” view, then the RGBA is applied. This is as close as I could get the images and the lidar model to match.
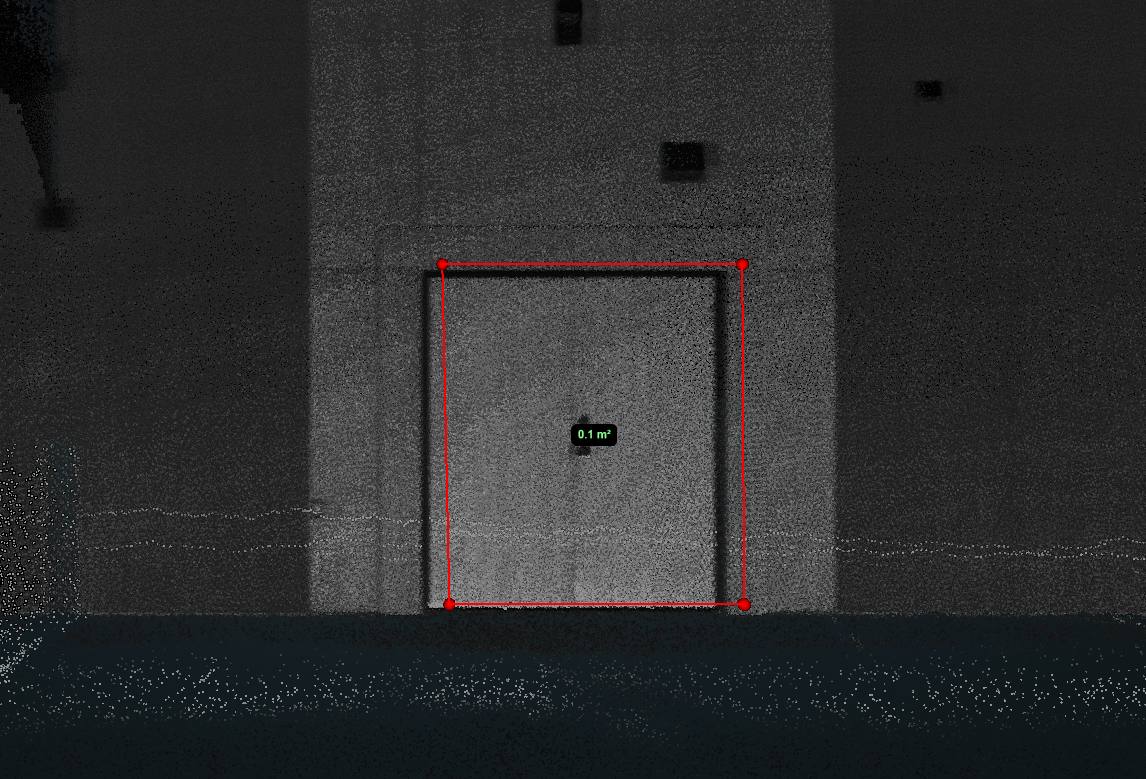
Here, I traced the RGBA image and compared my alignment to the intensity view. Dang it… I’m still off!!
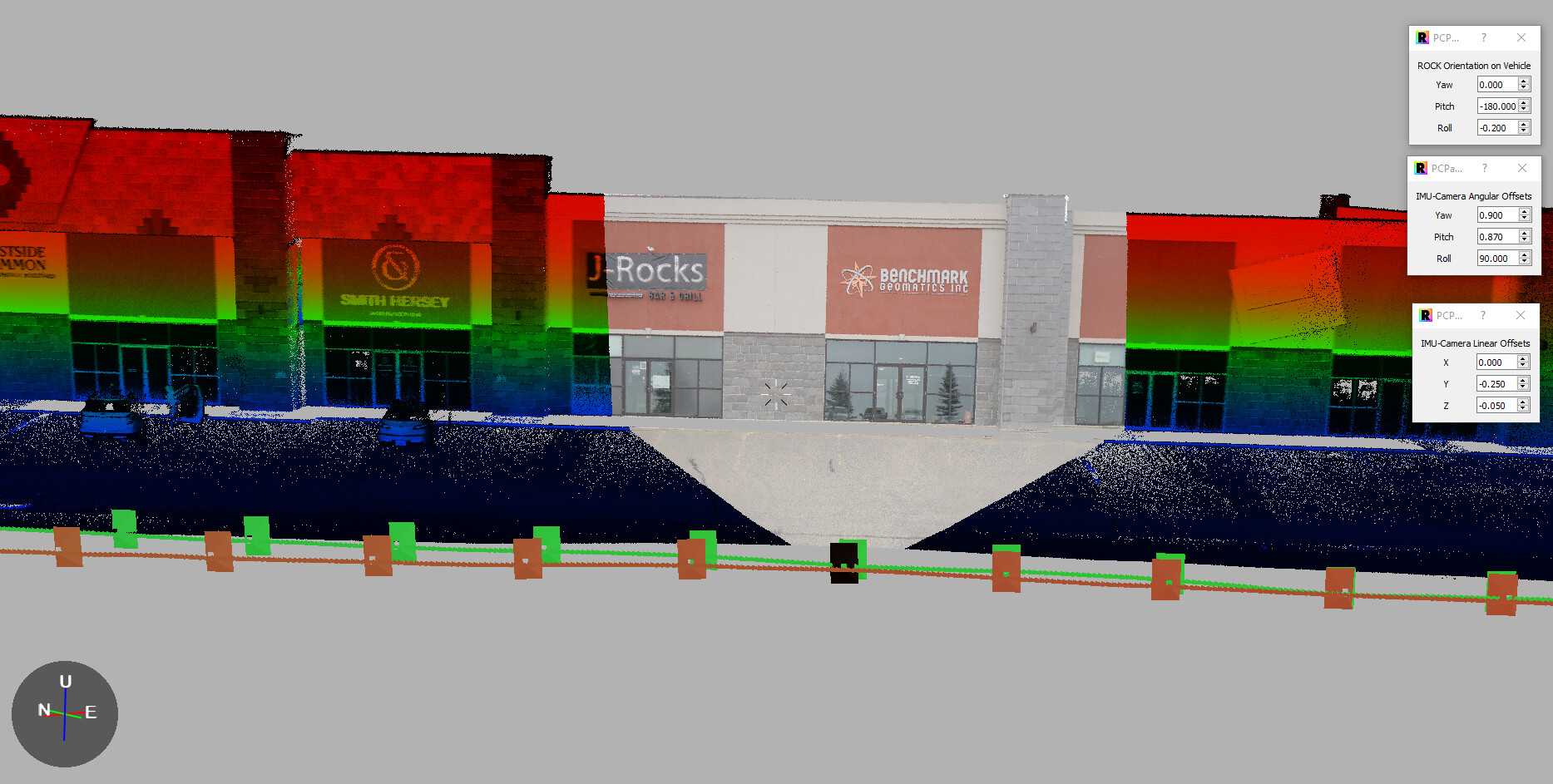
Here is an example of how I align my images. I can get this pretty close, almost exact… What I am curious about, did I change too many variables? Do you only mess with one set of variables? The adjustments seems random every time I do this (this is #7). I did level the R2A as best I could, but the vehicle does move off level when in motion (silly physics). However, it seems that when I adjust one image, the rest go out of alignment…
How do you do this to get maximum precision? What is a reasonable expectation here?
I just looked at your I-70 model… wow… so I know you know 
